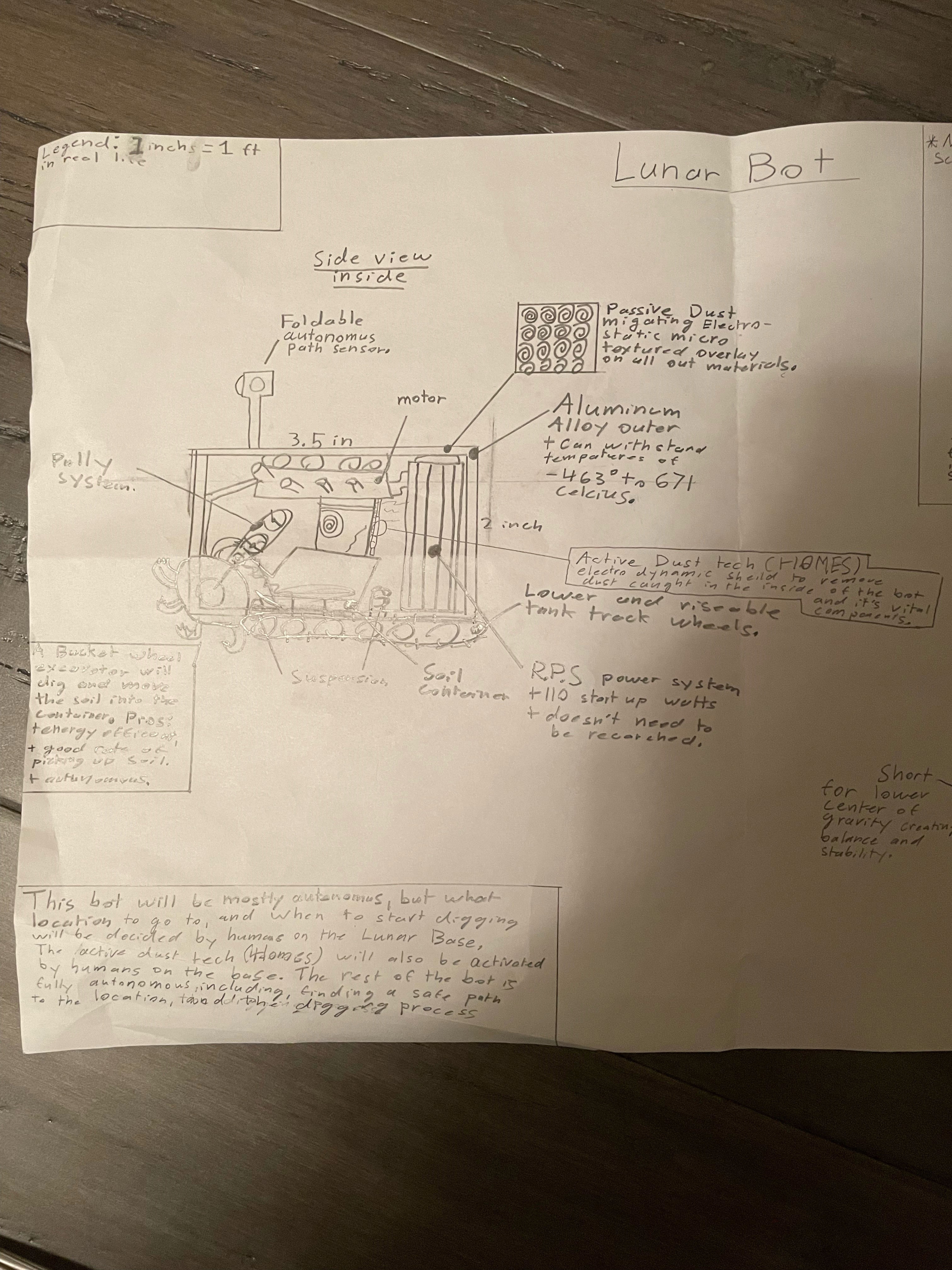
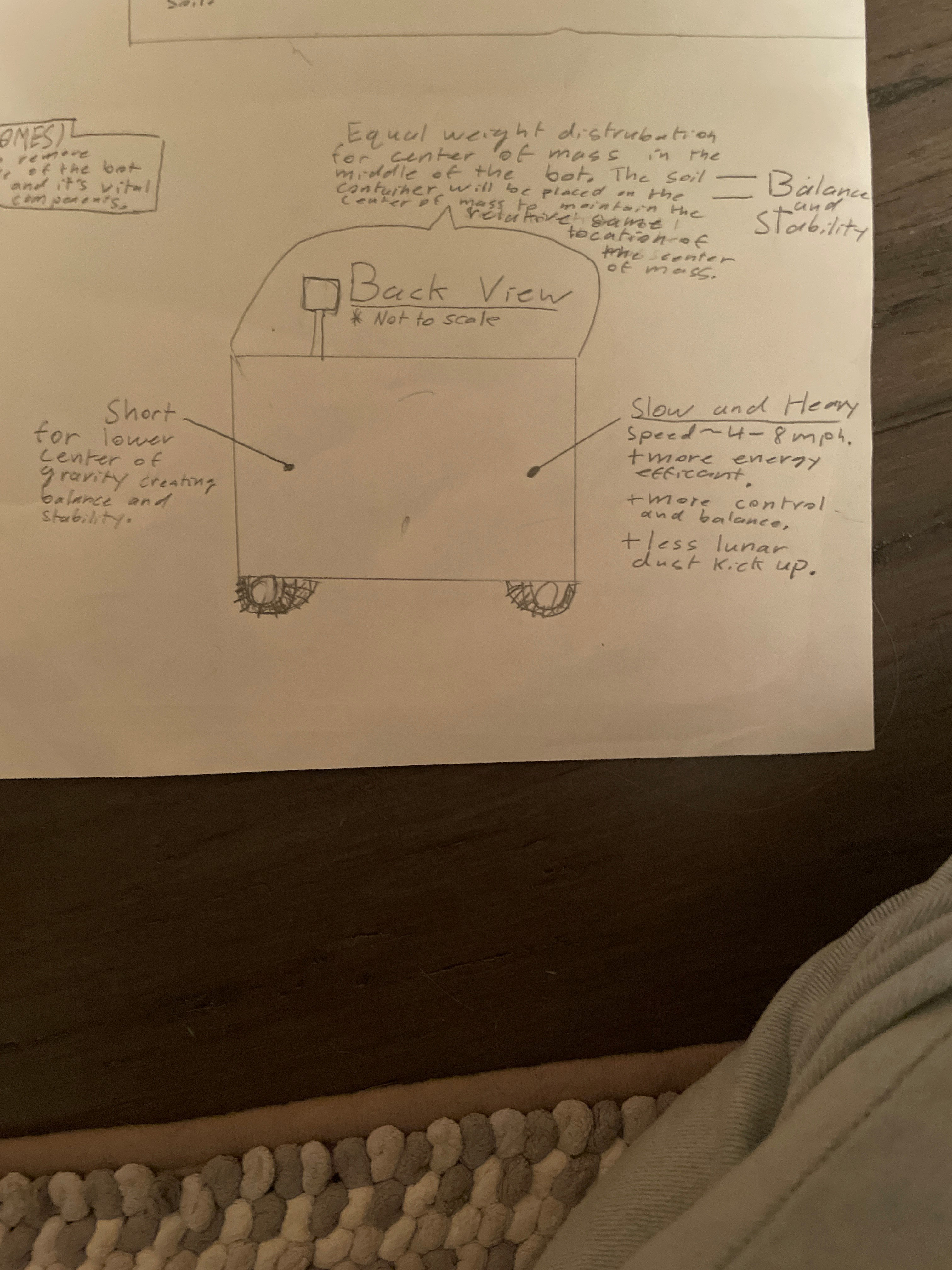
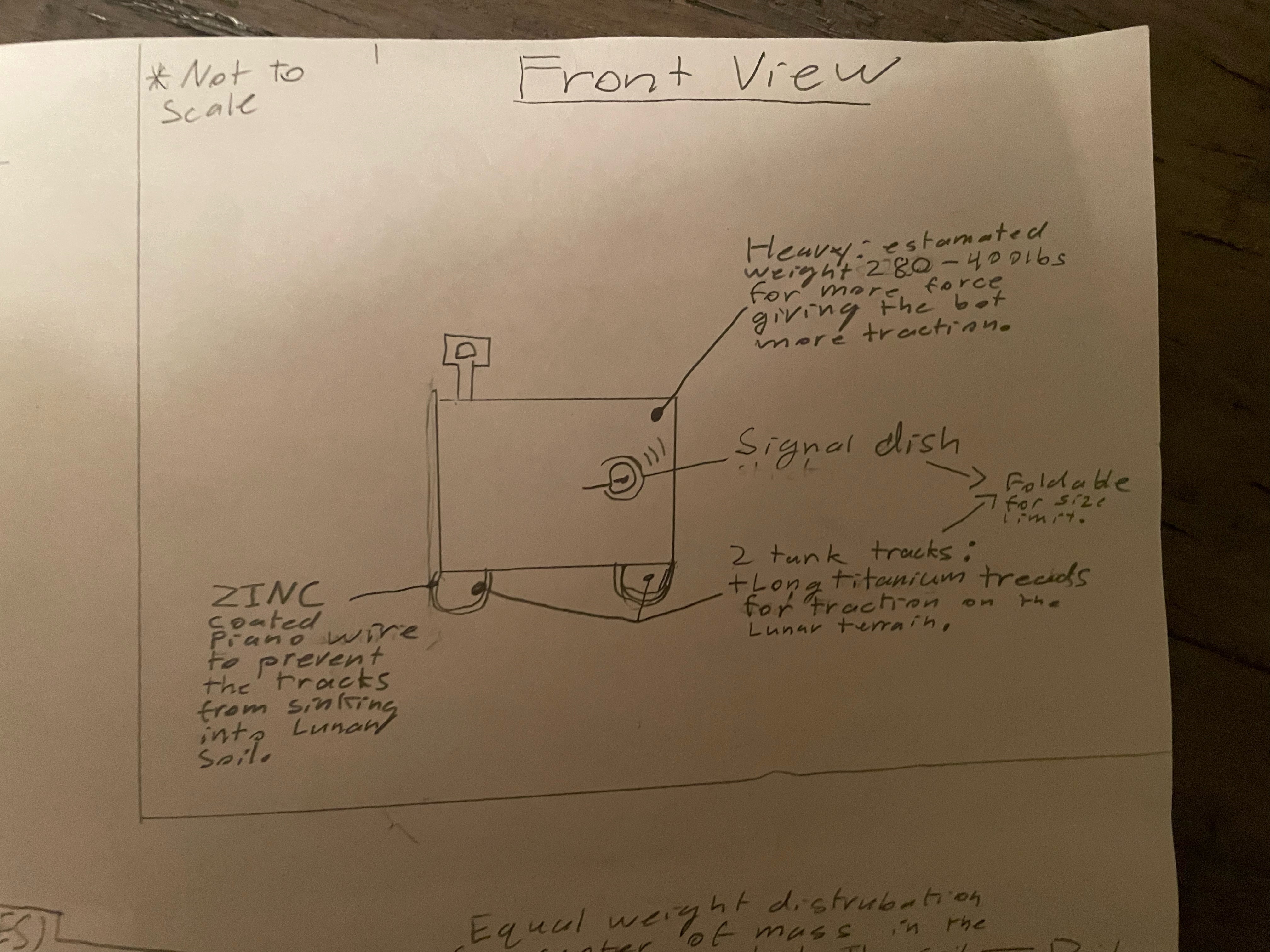
The Vamp Lunar Bot will use a mini bucket wheel excavator to dig and excavate the lunar soil, pulling it into storage within the robot. Dust from digging will be handled by passive technology electrostatic micro textured overlay on outer material and active the dust tech HOMES will protect the power system and vital components. Composition will be mostly aluminum alloy to withstand the extreme temperatures. The mostly autonomous bot will be partly remote controlled from people on the moon when needed for decisions on location, direction, when to start digging, and when to activate dust Technologies. An RPS will power the operations for efficiency. The bot will move at 5-8mph, and be heavy, have long treads, and piano wire on the wheels for traction. A low center of gravity, and equal weight distribution when soil is in and out of the bot will keep balance and stability.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org