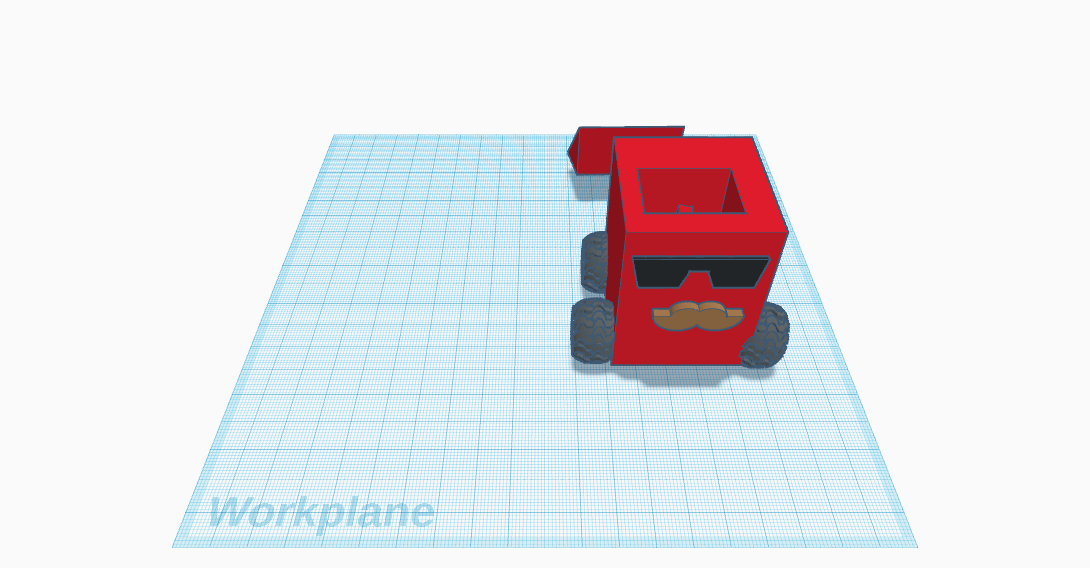
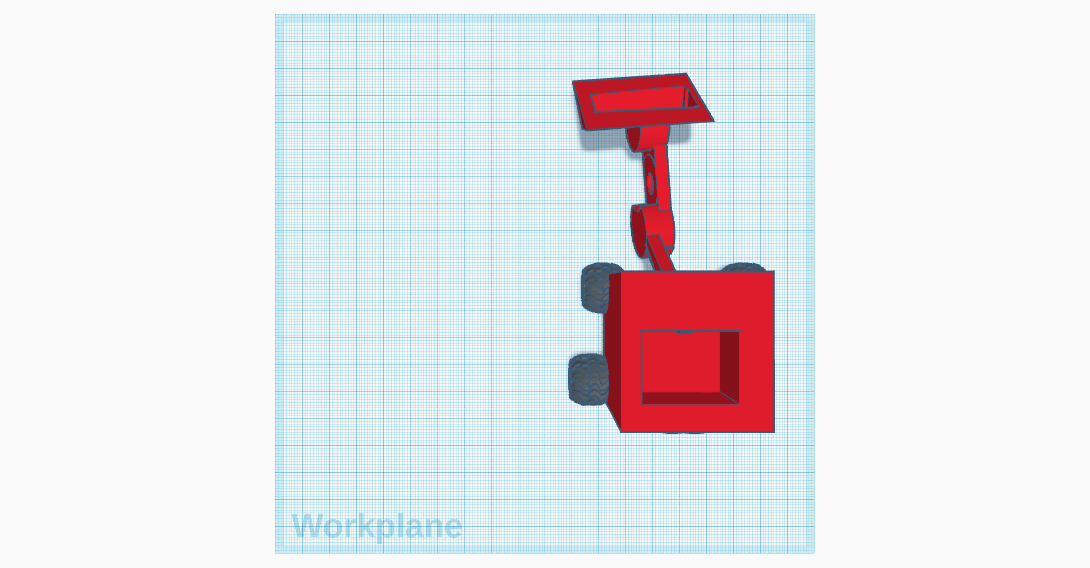
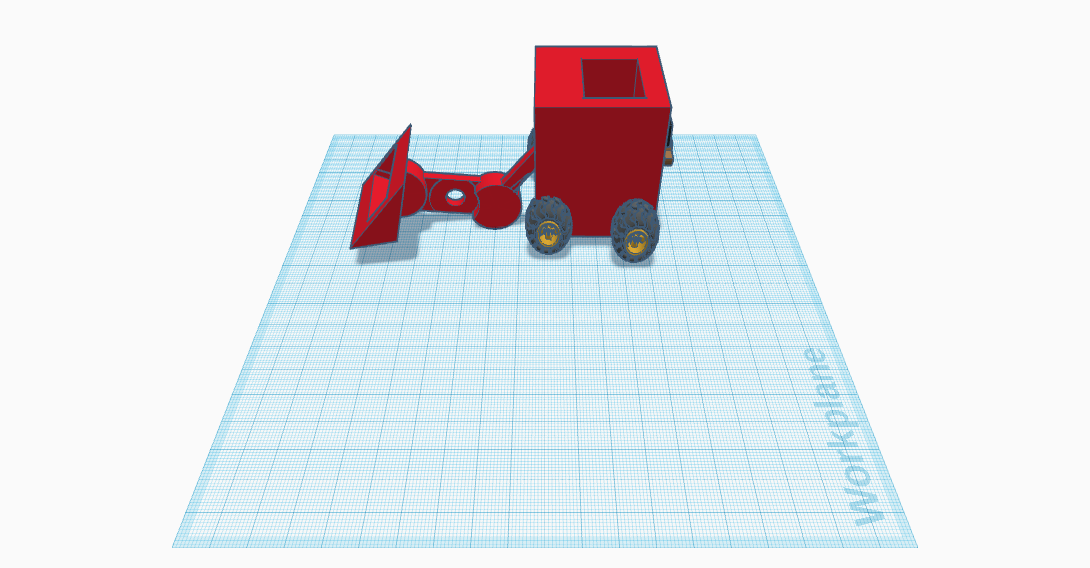
Physical Design- My robot will scoop or either dig with a claw with a deep hole so it can pick up a lot. My Tom-A-bot will move with his wheels.
Operational Design- My robot will carry lots of dirt in the scooper. It will scoop a lot from how deep the whole is.
Dealing with Dust- My robot design will handle lunar dust with vinegar fabric softener on the inside of the compartment. Inside the compartment will be vinegar fabric so the lunar dust can pick up and put it in the compartment. The scooper will also have vinegar fabric to pick up the dust.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org