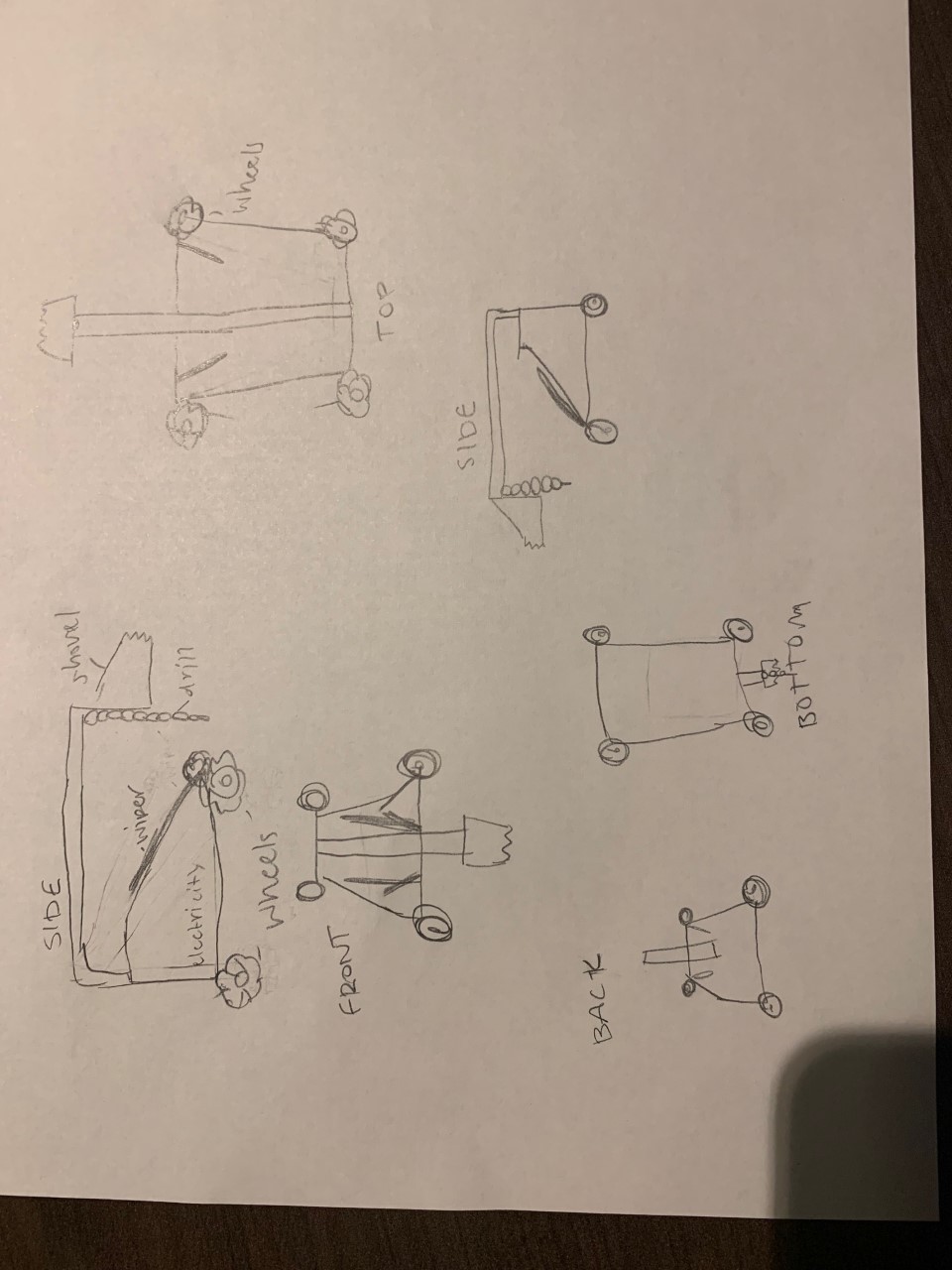
My lunabotic will be operated as autonomous and remote-controlled. For the power system, the robot will be solar-powered and recharged by sunlight and it will conserve energy. For the robot to stay upright it won’t carry a lot of soil so it will take little bits and it will go at varying speeds (just right). The robot will maintain traction on the surface of the moon it will have some compressed air. For the robot to handle extreme temperatures (127◦C- 173◦C) it will be made of metal. To handle and protect the robot from dust it will have special coatings and maybe use a wiper. For active dust technologies, it will have a magnetic dust removal system. The robot will dig and excavate the soil, it will use a drill to dig and a shovel to excavate the soil, and then it will take bits of soil to stay upright.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org