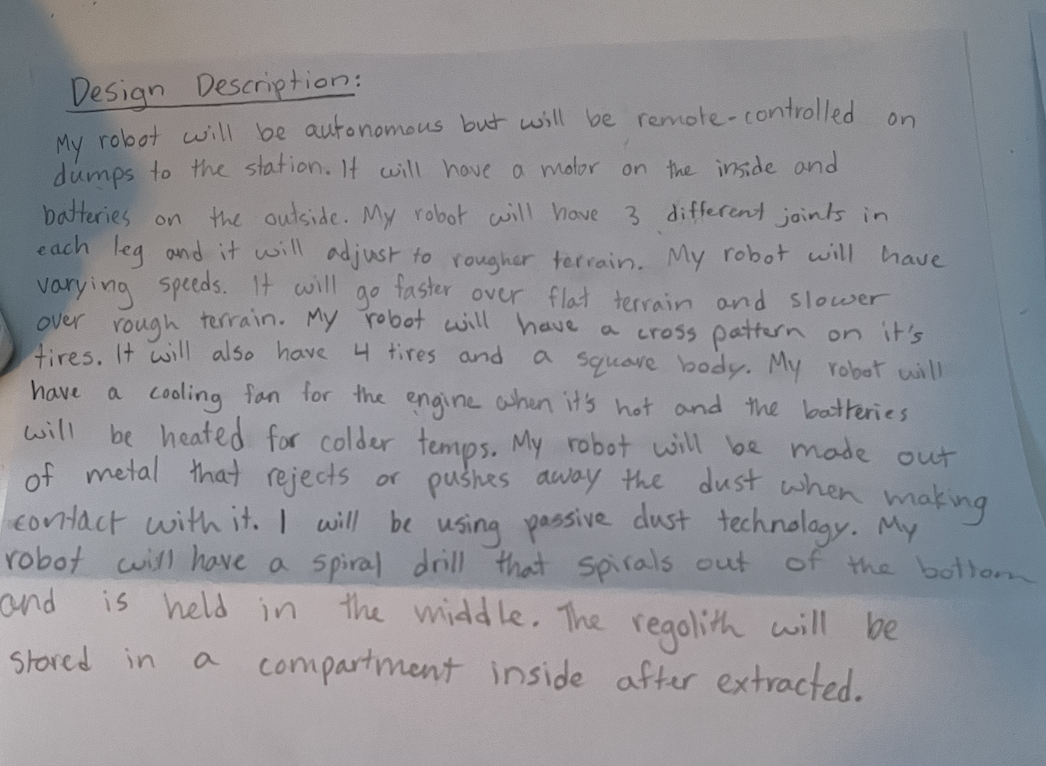
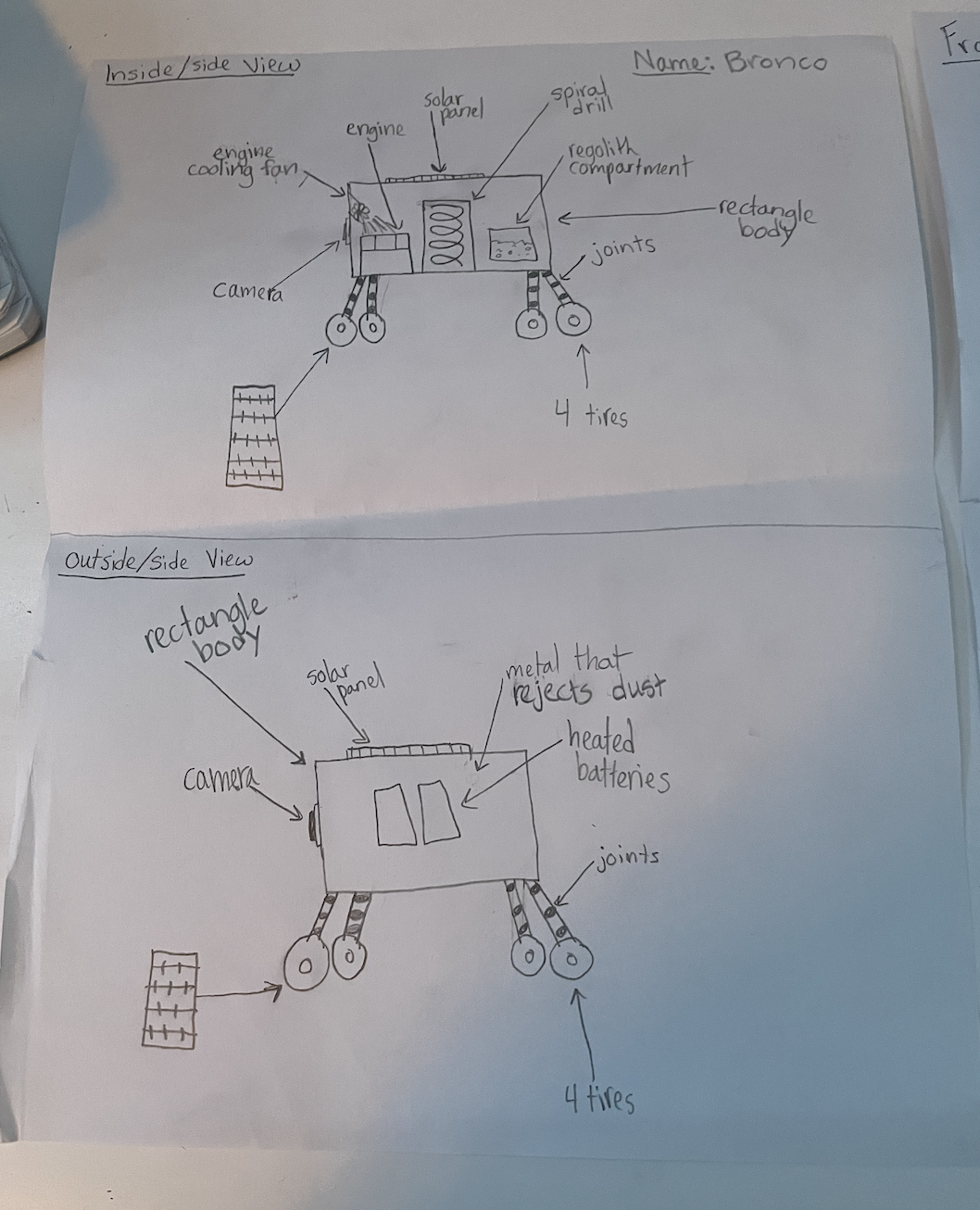
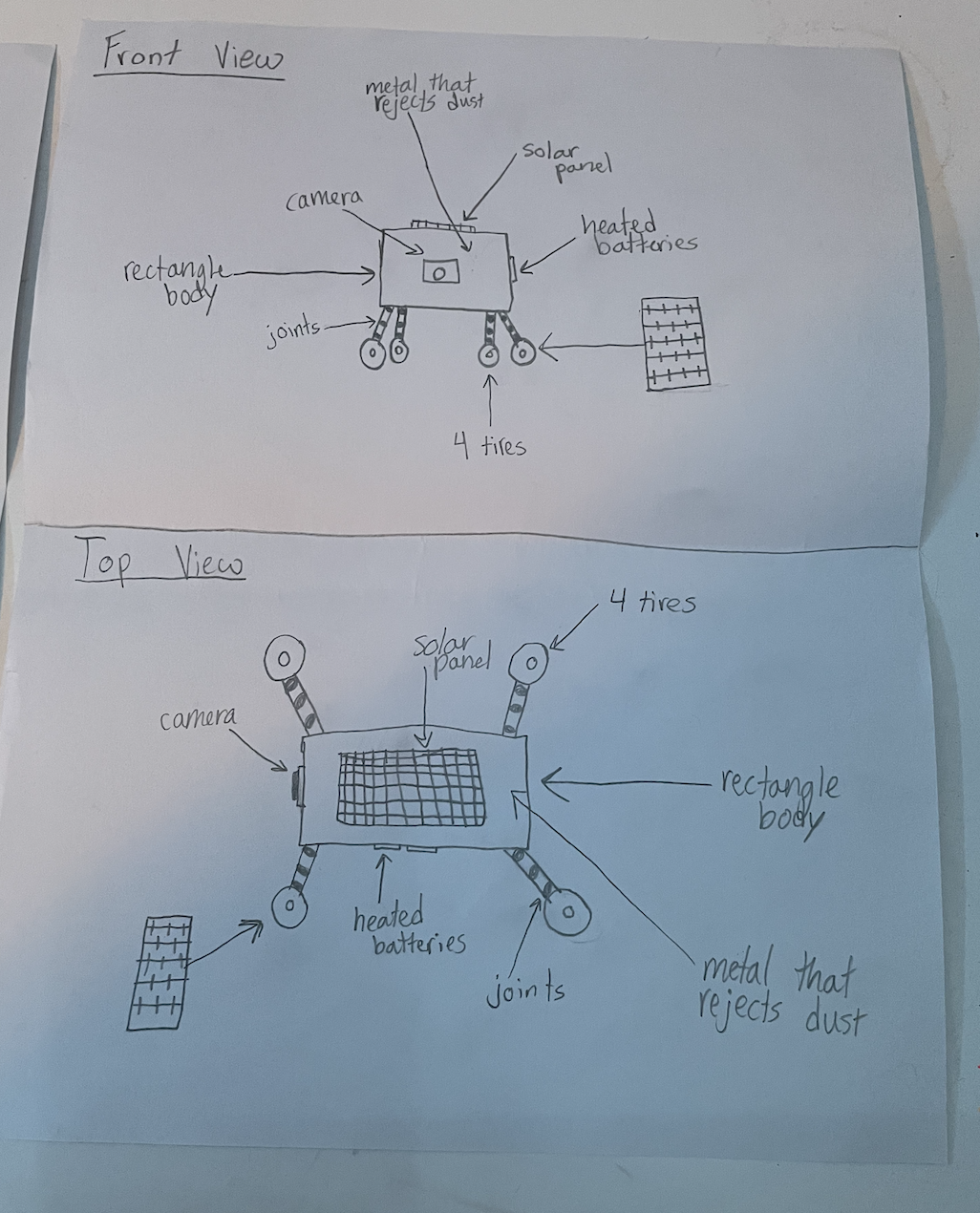
My robot will be autonomous but will be remote-controlled on lunar dumps. It will have an engine inside it and batteries on the outside. My robot will have 4 tires with 3 different joints on each leg to adjust itself on rough terrain and a square body. My robot will have varying speeds. It will go faster over flat terrain and slower over rough. It will have a cross pattern on the tires. It will have a cooling fan for the engine when it's hot. The batteries will be heated for colder temps. It will be made out of metal that pushes away the dust when in contact with it. I will use passive dust technology. It will have a spiral drill that spirals out of the bottom and is held in the middle. Regolith will be stored in a compartment inside after extracted.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org