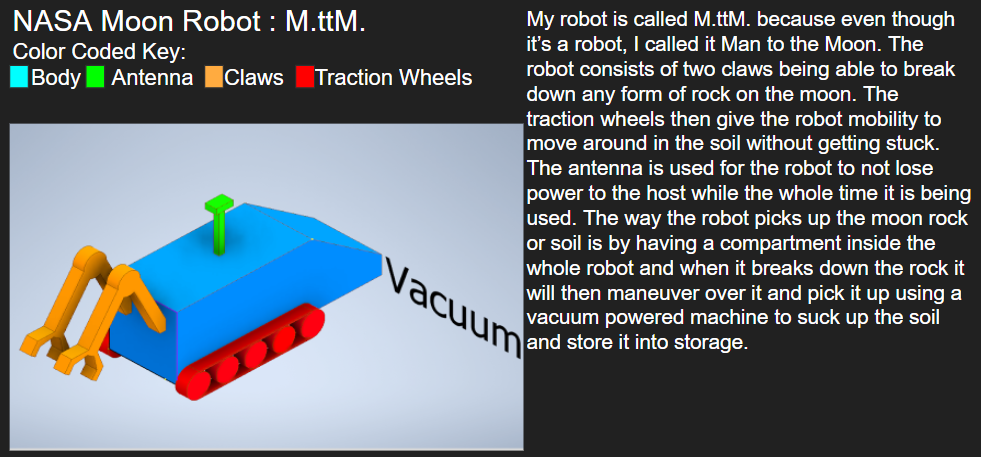
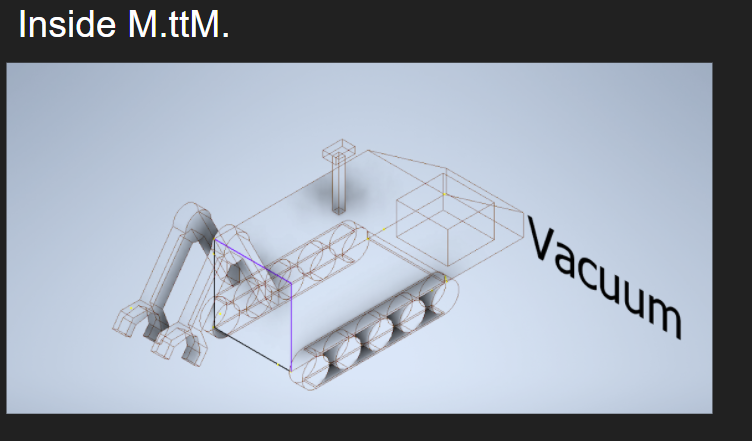
My robot is called M.ttM. because even though it’s a robot, I called it Man to the Moon. The robot consists of two claws being able to break down any form of rock on the moon. The traction wheels then give the robot mobility to move around in the soil without getting stuck. The antenna is used for the robot to not lose power to the host while the whole time it is being used. The way the robot picks up the moon rock or soil is by having a compartment inside the whole robot and when it breaks down the rock it will then maneuver over it and pick it up using a vacuum powered machine to suck up the soil and store it into storage.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org