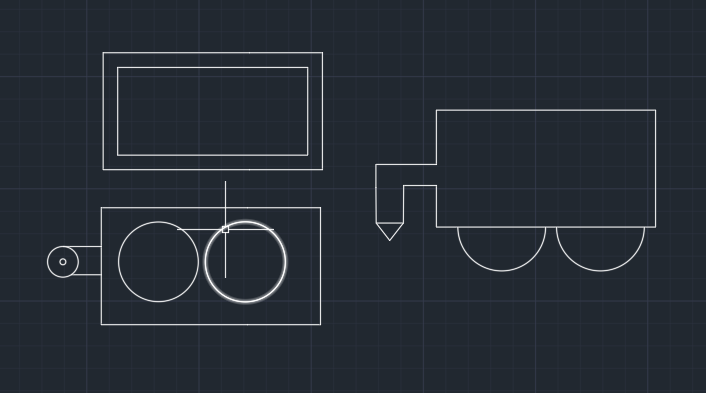
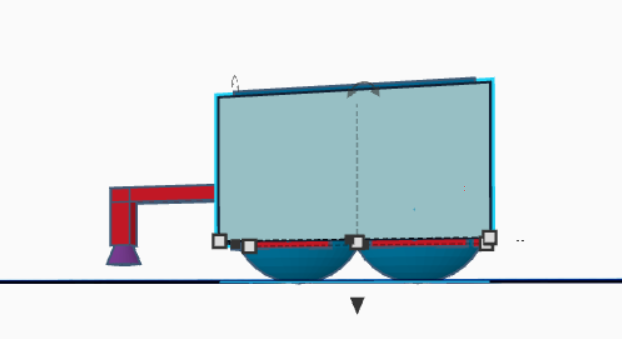

My robot has two main parts to it. The moving system and the picking up system. Firstly, my robot moves on two large spherical objects which can go left, right, forward and backwards. The reason for the spherical shape of the wheels is to prevent dust from getting into the gears and motors, this is done by putting all the parts within a large metal container. The wheels will be able to rotate in any direction, and once they are starting to rotate inside the vehicle there will be layers of brushes outside the rover, from fine to very fine, this will reduce the amount of dust actually getting into the metal container. For the picking up system, there will be a bon tool like object protruding from the rover itself, this will be set up in a way to where it capsules the collected sample after it is collected.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org