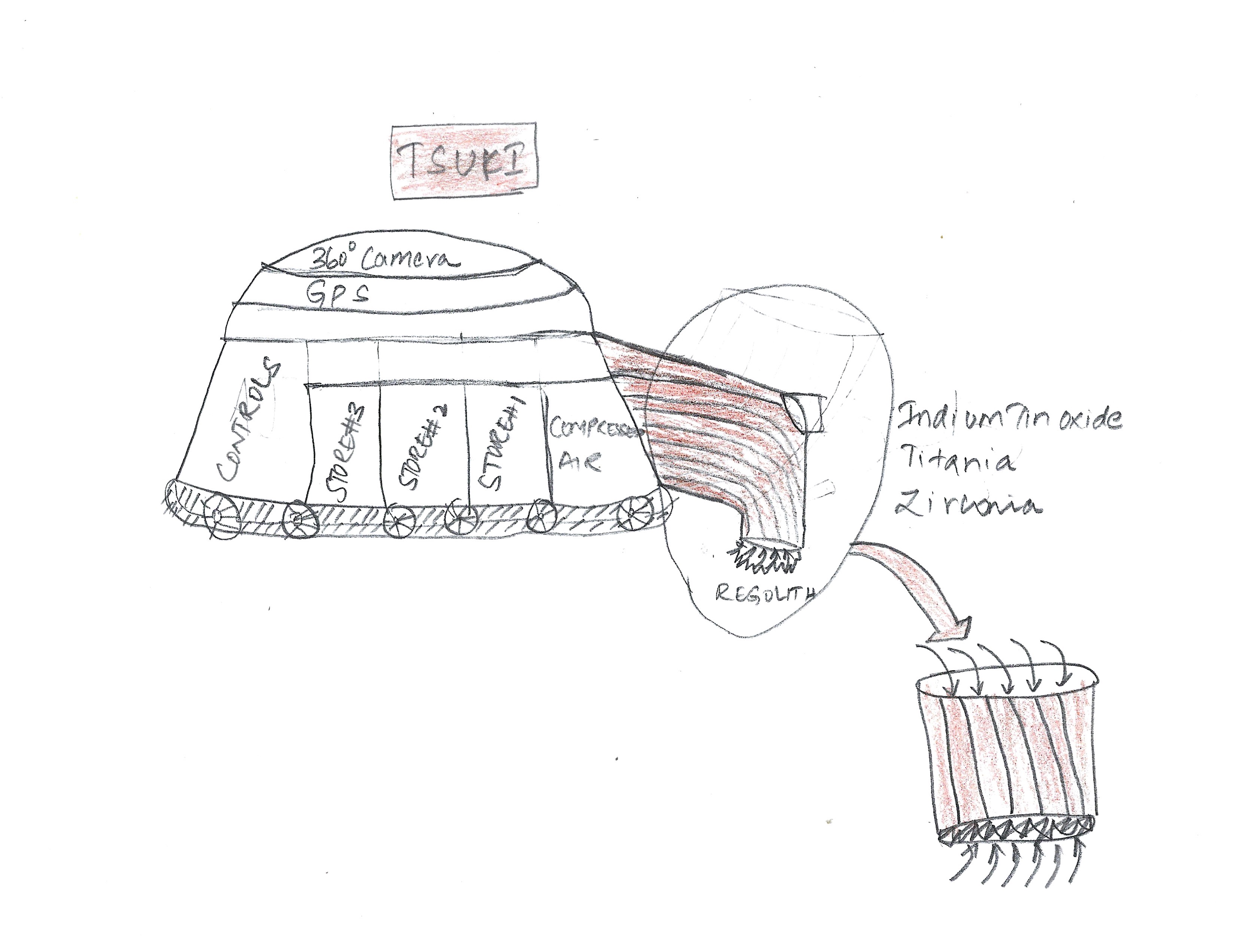
My LunarBot is named Tsuki (moon in Japanese).
My design is a cylindrical set of pipes to suck regolith and store them in these cylindrical containers, the scop and dig via a rotating sharp scooper at the end of the cylinder.
The design is to suck the dirt and drop the filled cylindrical set of tubes which another bot can collect and bring them back to base. This design is such to reduce the number of roundtrips to base.
There are few options to negotiate this issue:
• Use of Indium Tin oxide film coating on edges which encounter lunar surface
• Use a combination of Titania and Zirconia coating on the entire bot to avoid static clings
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org