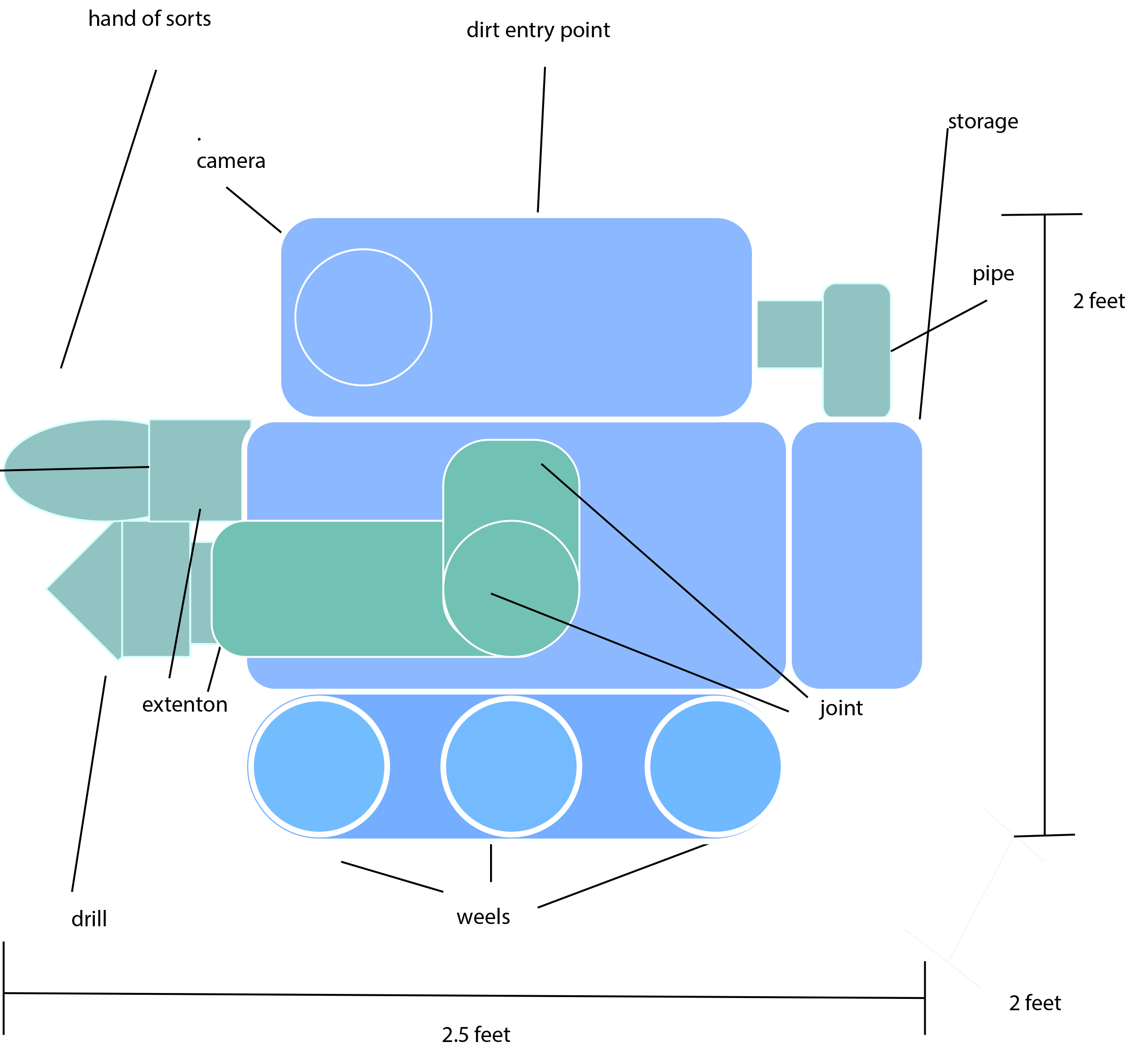

This robot is designed for maximum collection speed. It is round for weathering purposes with the standard titanium shell. The arms will act like an average rover’s. The drill will be used to dig down for any need from better soil to metals below the surface. The scoop will go down into the soil and simply close to hold dirt inside until it is placed above the storage entry point where it will be dropped. The wheels will be in a standard belt to prevent erosion of the wheels. The storage system will start at the head and when it is full enough it will flow into the storage on the back. When it goes to unload/charge it will enter an airlock then go to its station to have the storage unloaded with a vacuum, an extended charge at the back and an electron beam for the hard soil.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org