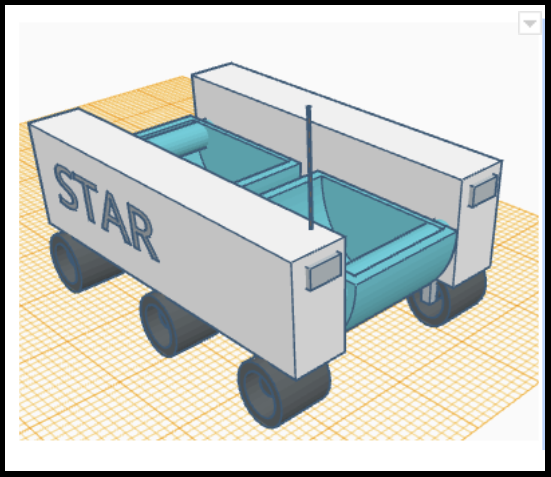
Each wheel is connected to the sides by bars and made of mesh so it can drive easily through regolith.
Each wheel has its own motor to minimize the sharp, fine regolith getting stuck in moving parts.
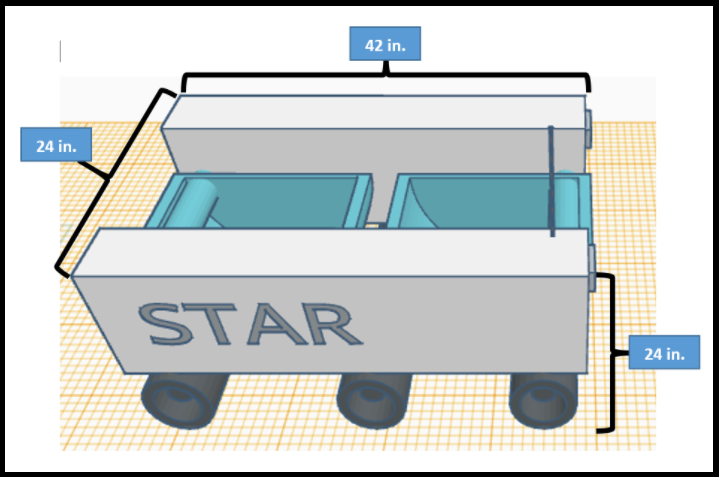
Batteries (right side) power the rover and charge back at the solar-powered base.
Both scoops rotate all the way around on connecting axles to dig simultaneously. This is because one scoop could move the rover as it digs in low gravity.
During the project, I learned all about the moon and different rovers NASA has used. I also taught myself Tinkercad to design this rover. This project allowed me to combine science with my creativity to solve problems. For me, the most interesting part of this project was considering the many different designs for how scoops could work on the moon.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org