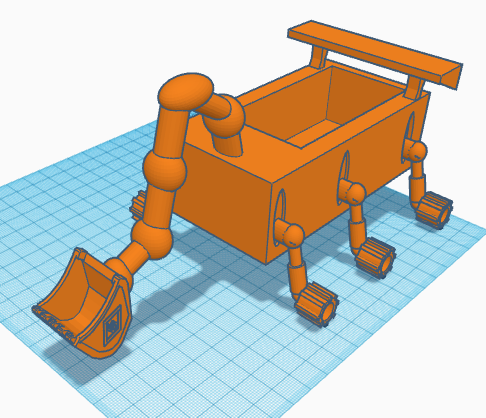
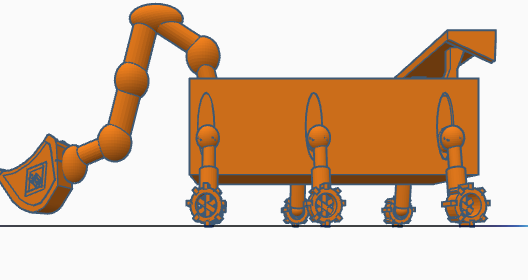
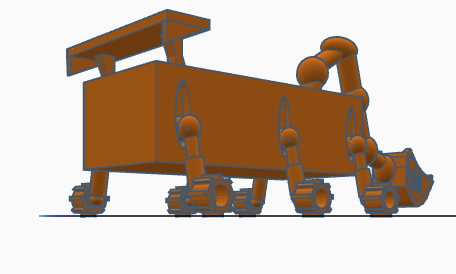
To assist with the first journey the rover will be remote-controlled from earth for the mapping the moon. Powered by external nuclear power source there will be docking stations and onboard solar panels acting as a spoiler. The Bottom of the rover will have lithium-ion batteries. The dust problem will be handled with a shaker in the rover and compressed air. With six wheels each individually powered and going at the speed of 5-10 mph to limit dust kick up. Rover will be able to lower and raise its suspension and have a wide base. Wheels made from aluminum the wheel will sport cleats along with spikes. The rover will have a excavator arm that will dig and dump regolith in the storage container. The rover will have aluminum framing, gold protective coating for heat and radiation. The rover will be insulated and have radiators to cool the rover down.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org