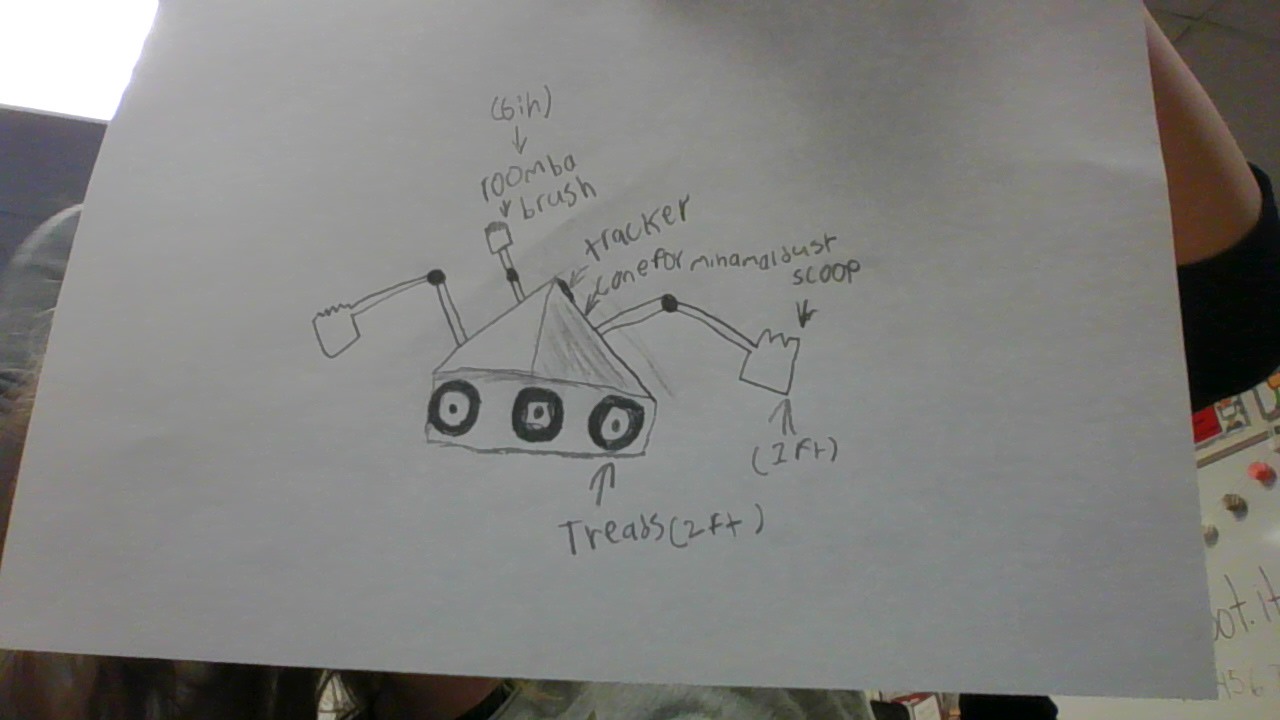
My robot will dig with two large scoops on either end. The form of transportation will be a two foot long tread strung between three motors. It would also have a tracking device seeing as it could get lost. That way people can find it if it gets lost.My robot will transport medium amounts of lunar dirt per trip with good speed. The three motors would make it on the larger side however I believe that where it has bad size it makes up for it in productivity.My robot would have a function where it would stand taller and shake off the dirt. Any dirt leftover would be taken care of by a small brush with roomba technology to seek out any leftover dust from the shaking. These two functions combined would keep it clean.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org