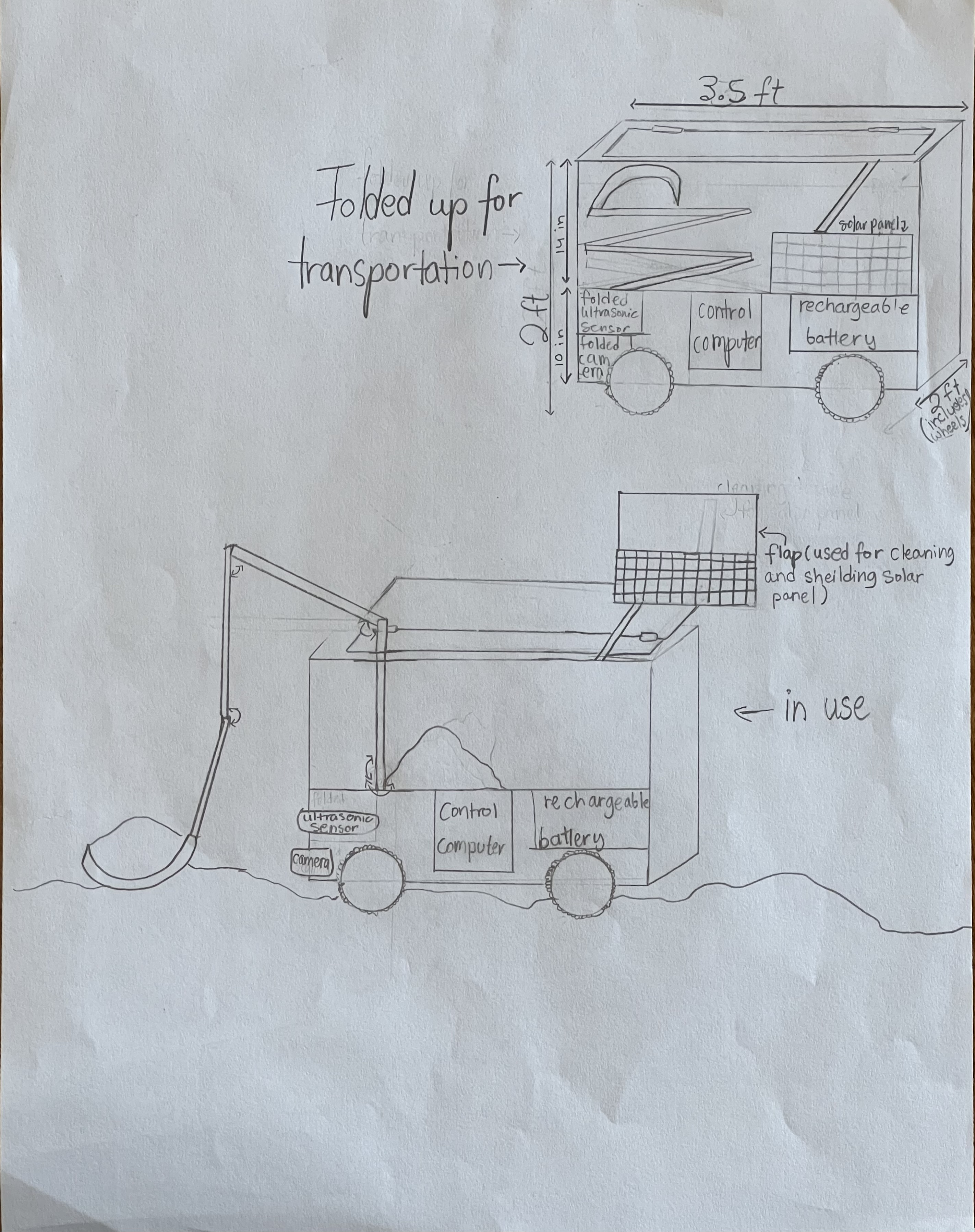
My robot, Selene Digger, is named after the Greek goddess of the moon. The shovel arm and solar panel fold into the compartment during transportation. It digs up dirt using its shovel, and puts it into the storage compartment. Once the compartment is full, the robot carries it to the holding container. It uses solar energy for power. The tires on the four wheels have traction so that they can move on the lunar surface. I have a camera which can notice landmarks so the robot knows where it is, and an ultrasonic sensor to help avoid large objects like boulders. The solar panel has a flap on it to shield it, and also to clean it of dust. My robot is made of titanium and uses coating technology so it attracts less lunar dust. The top picture shows the robot during transportation. The bottom picture shows it being used.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org