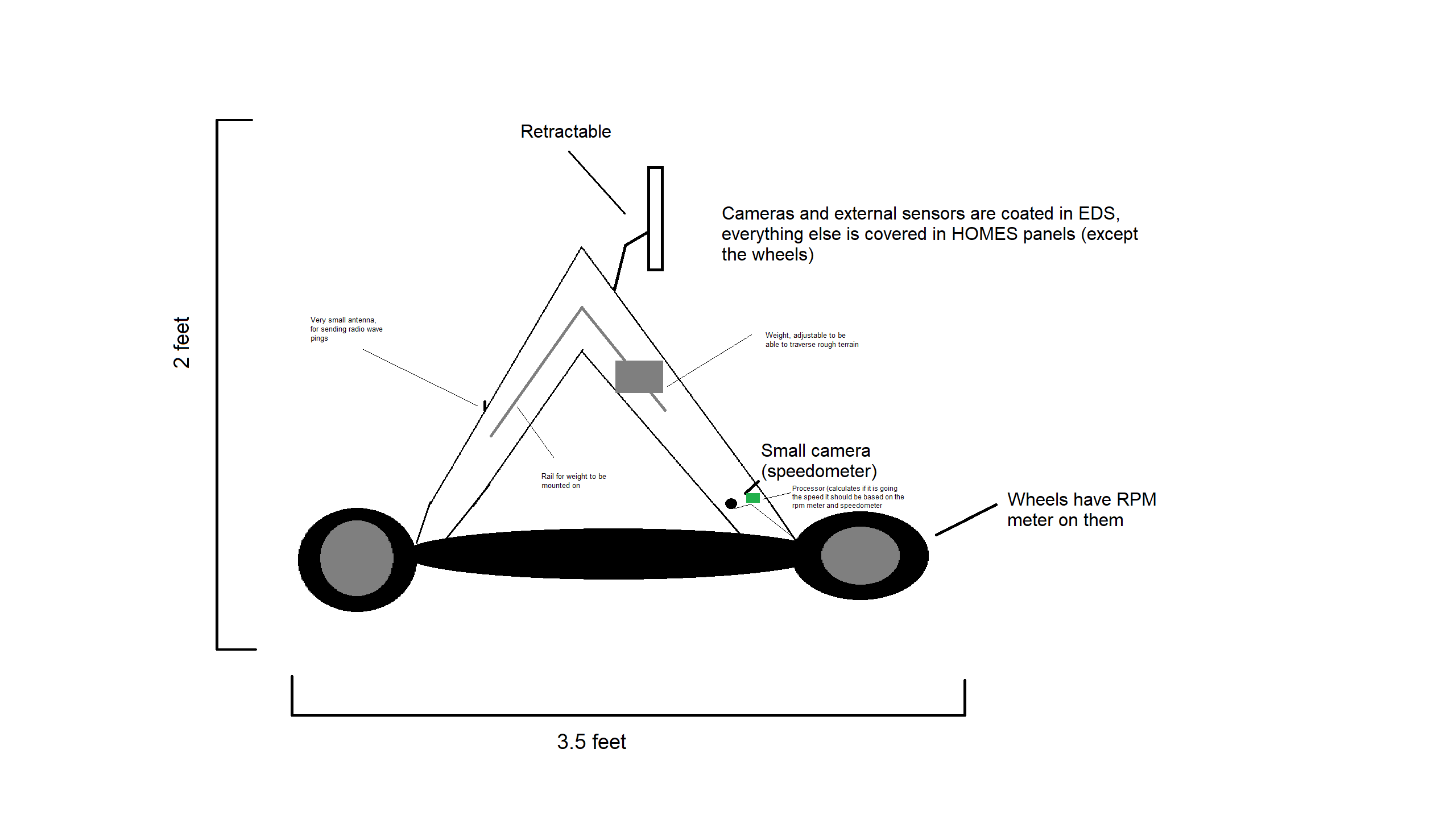
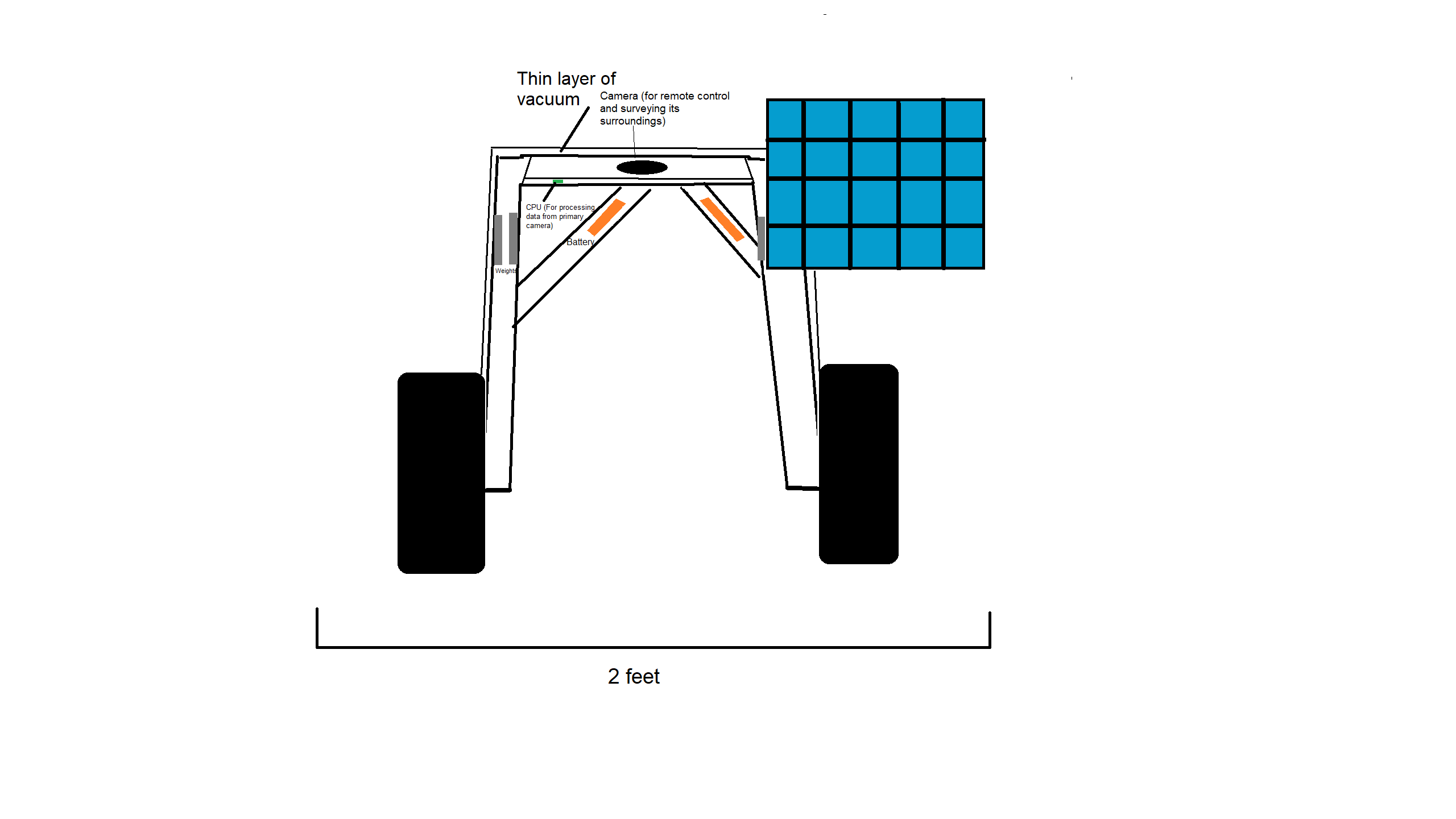
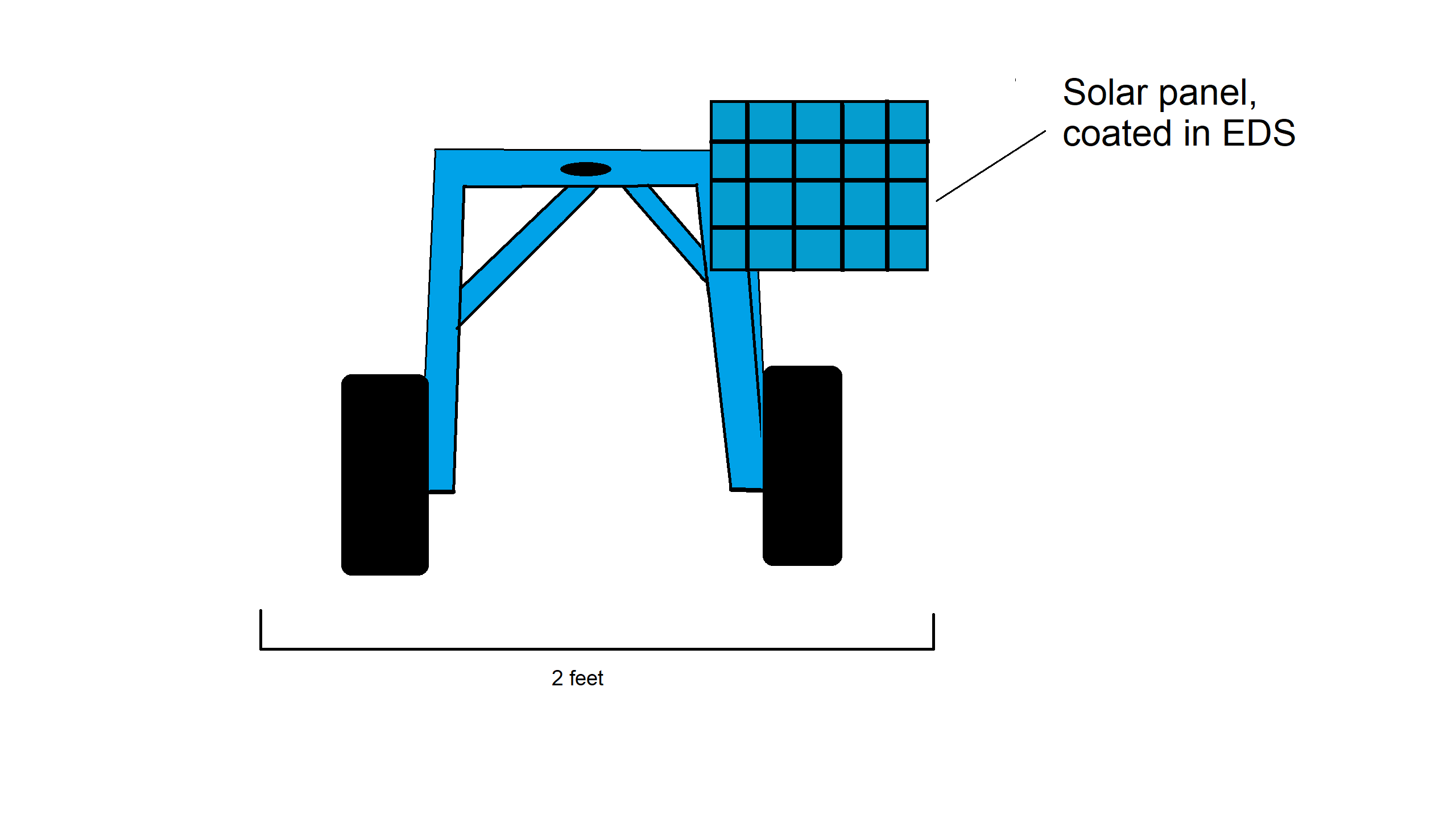
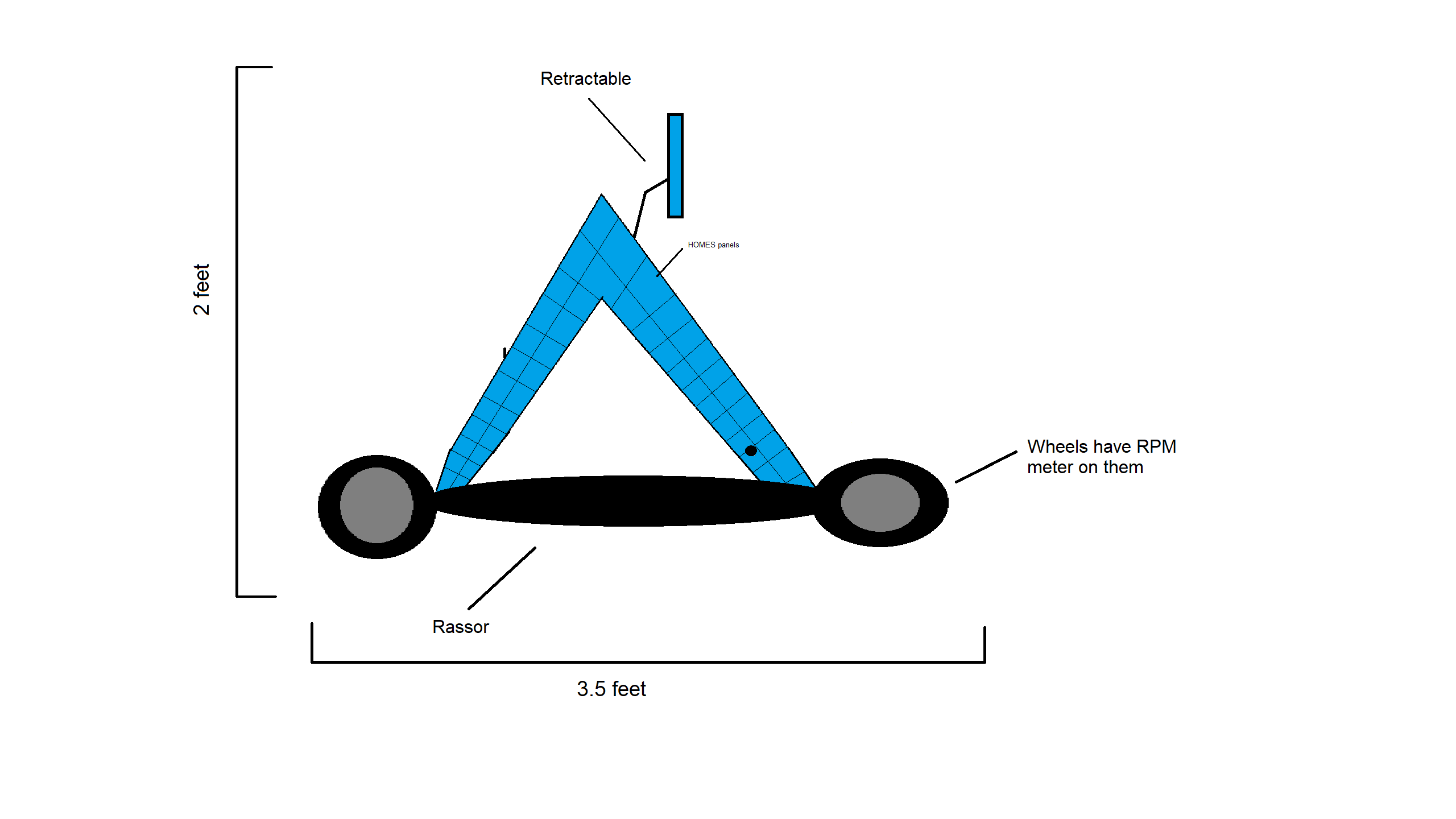
The robot will be autonomous most of the time. It will be continually charged via solar panels, which connect to rechargeable batteries. It will have two layers with a vacuum in between them as an insulator. Its wheels will be a smaller version of RASSOR in order to collect and store regolith. It will calculate paths for navigation based on images it captures and use 2-way radio pings to locate Artemis or drop-off stations. If it can’t identify a path it will request remote control. To ensure it is moving properly it will compare wheel RPM with ground speed measured by camera and accelerometer data. The center of mass can be adjusted via movable weights. Speed will be limited to 5-10 MPH to reduce dust. External sensors and solar panels will be coated in Electrodynamic Dust Shield. The remaining surface will be HOMES panels.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org