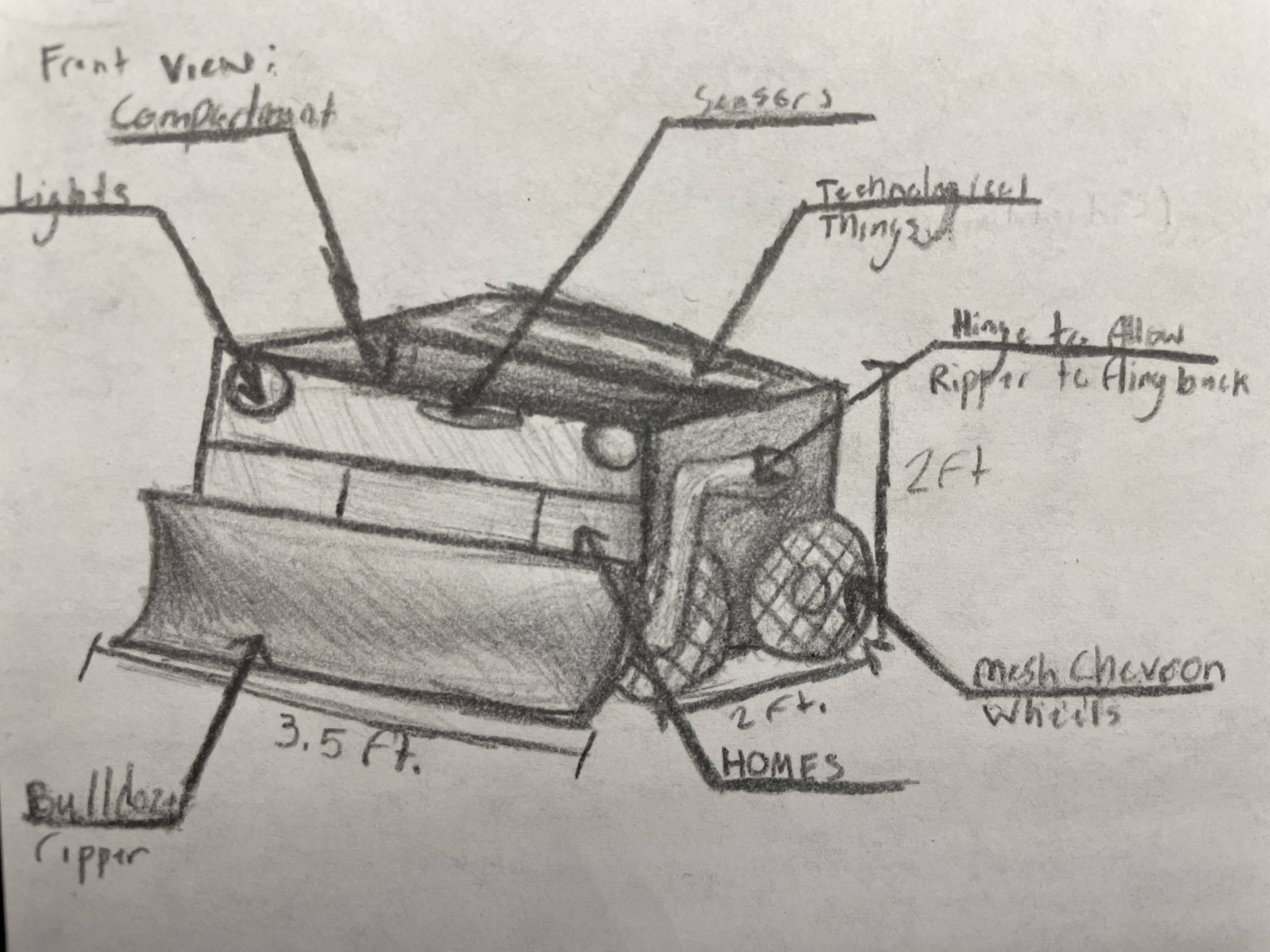
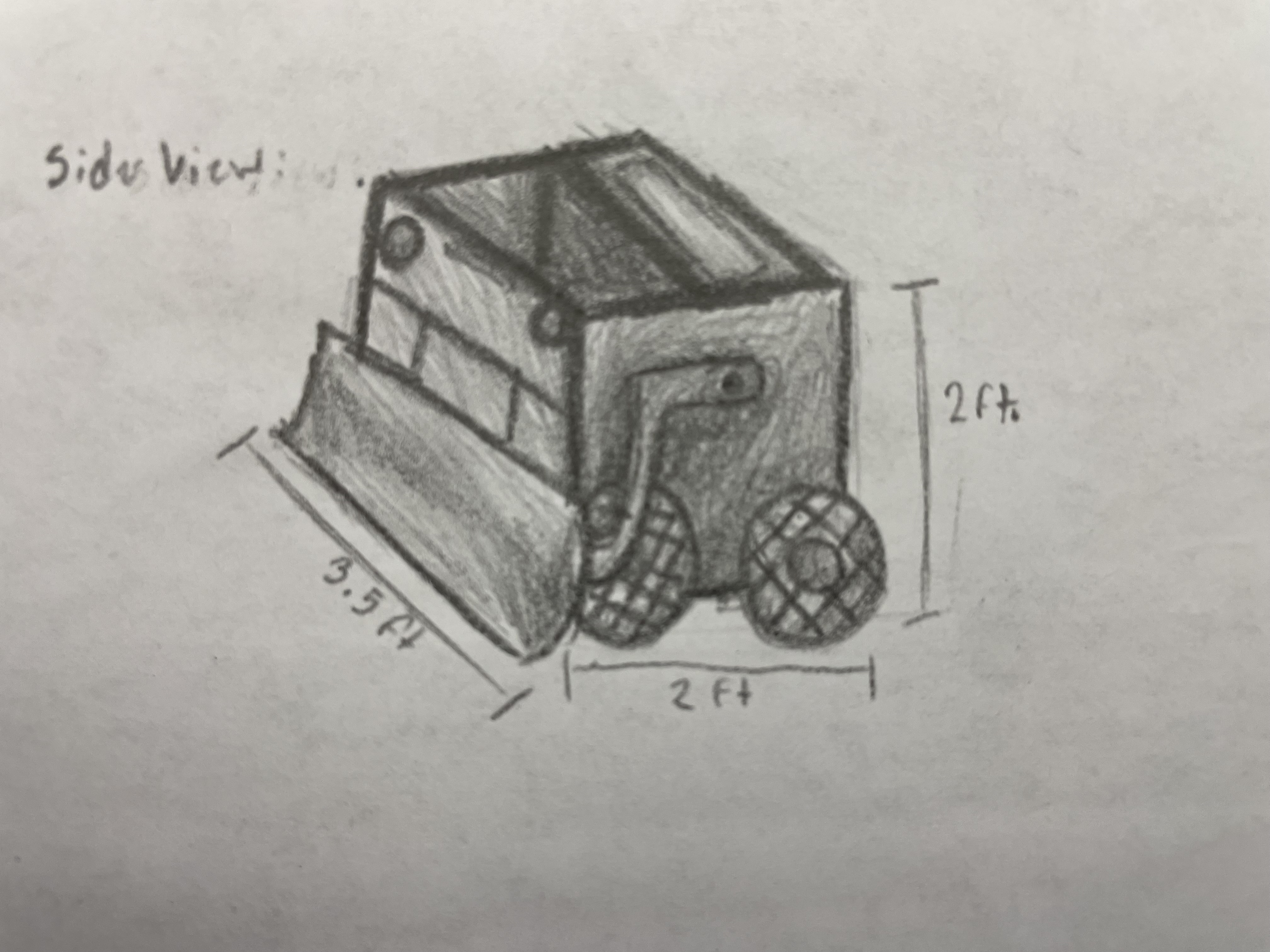
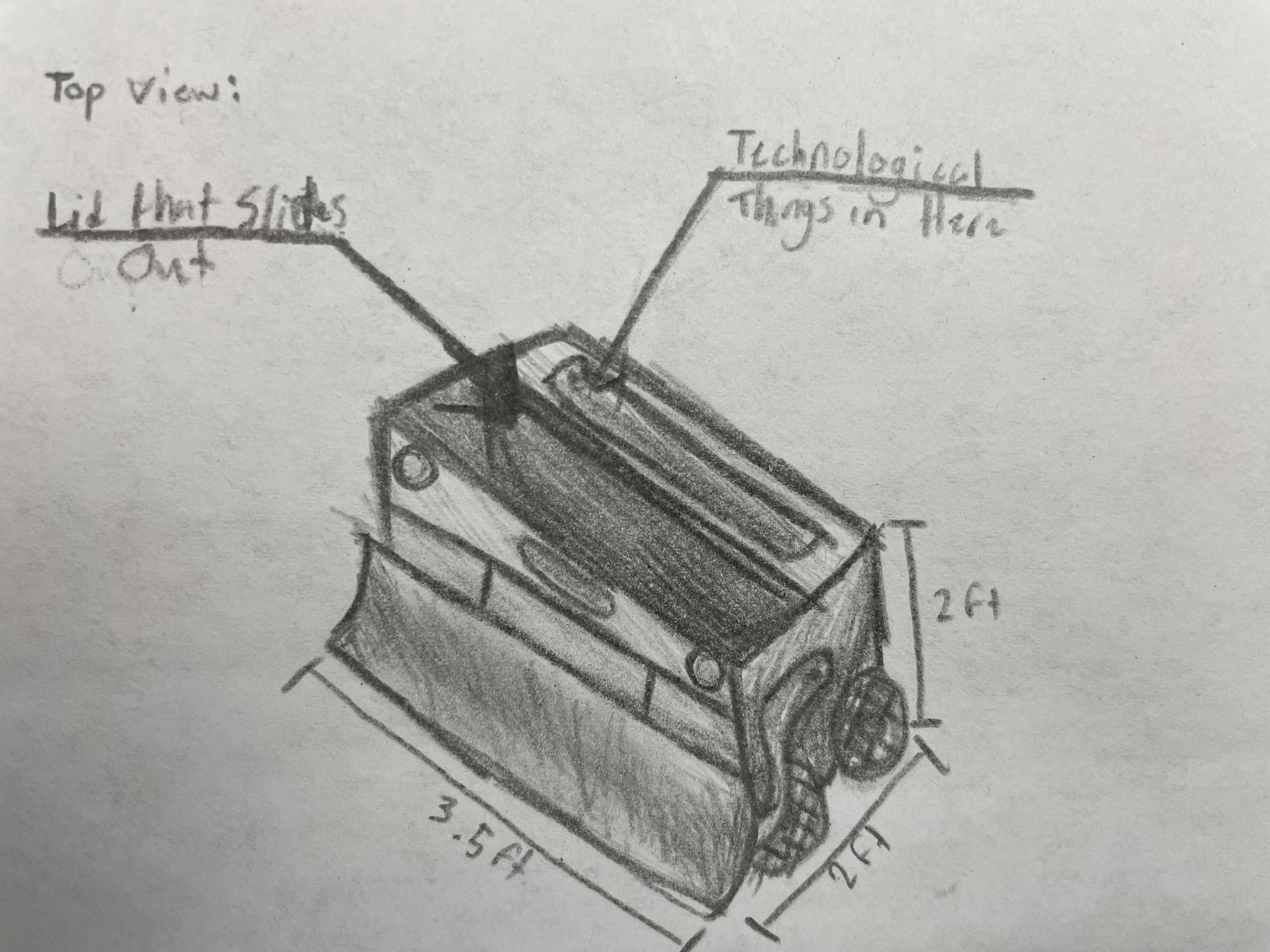
Exal will be operated both autonomously and controlled by and astronaut on the moon, which will map out a route for it to autonomously follow. It will use RPS along with solar panels and have a strong and balanced base with the low center of mass. Exal will have a slower pace that can vary depending on how much regolith is in it and the terrain around it. To keep traction, the robot will have mesh wheels with a chevron pattern. Since there is very high and low temperatures, it will have a stainless steel exterior and an aluminum interior. Exal will have a coating on the entirety of its surface as well as HOMES technology to reduce dust. Finally, to dig and excavate the lunar regolith Exal will have a bulldozer ripper on the front that can fling back into a compartment which has a sliding lid.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org