Project Stardust is an automated rover for lunar logistics operations. It uses a variety of integrated technologies to effectively dig and move regolith.
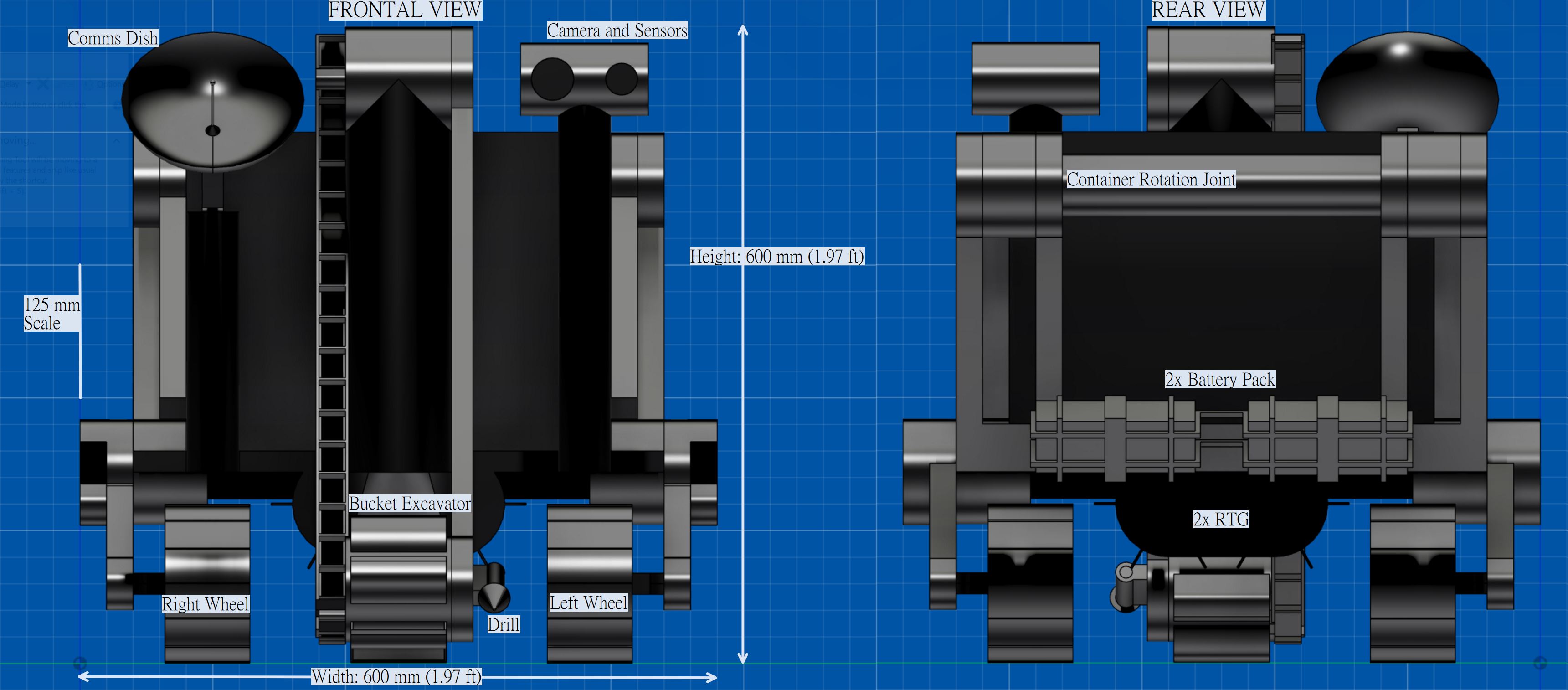
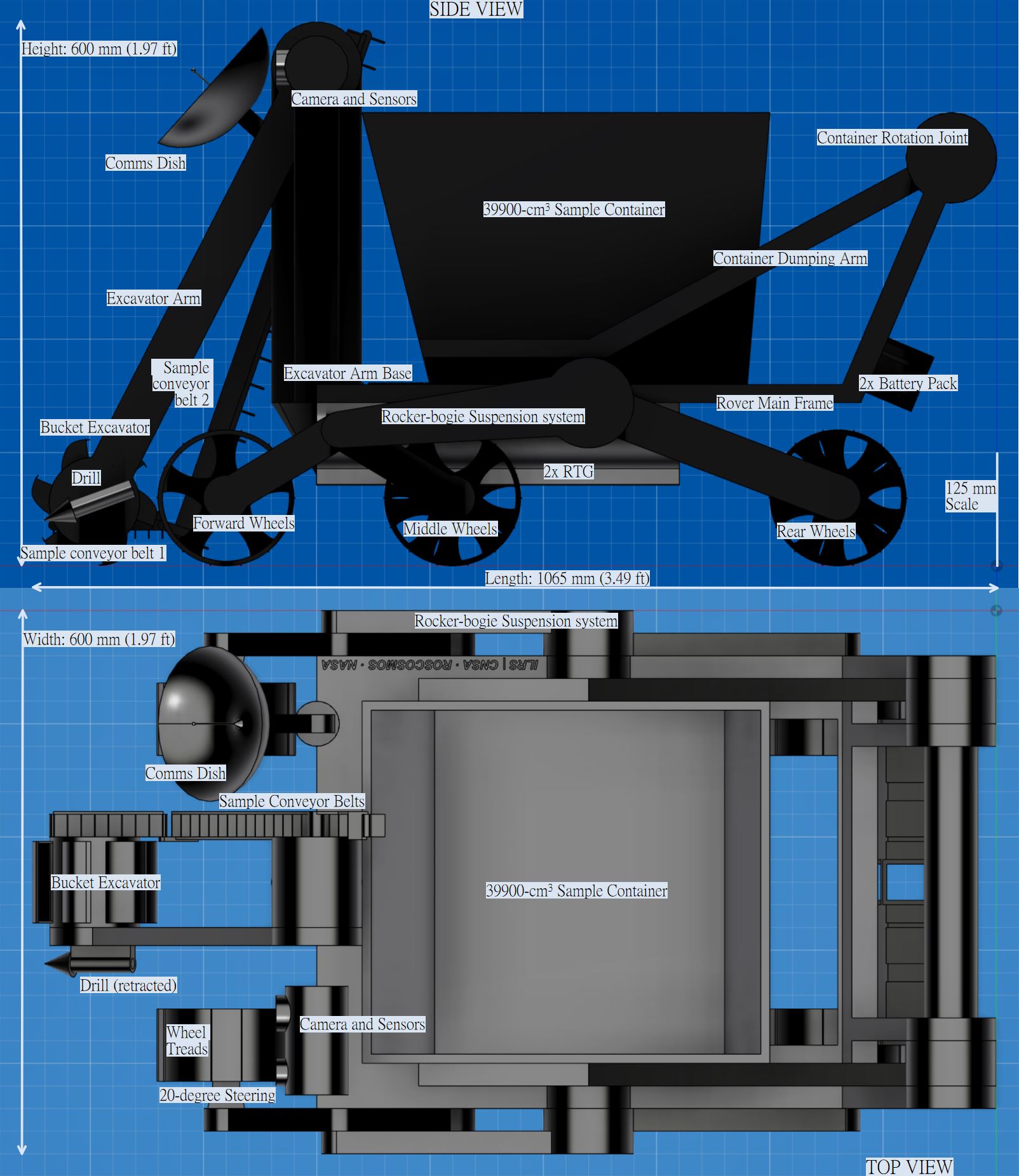
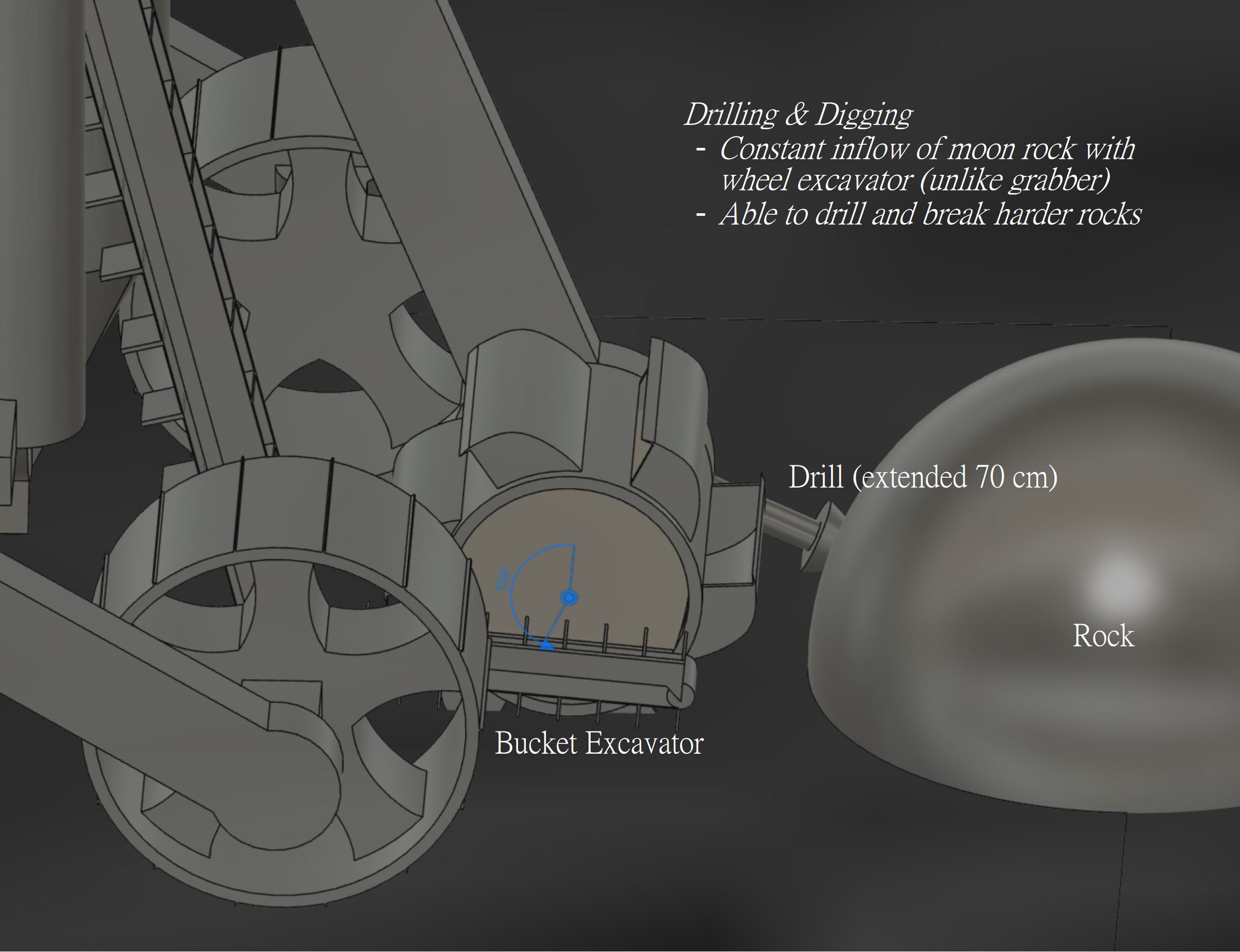
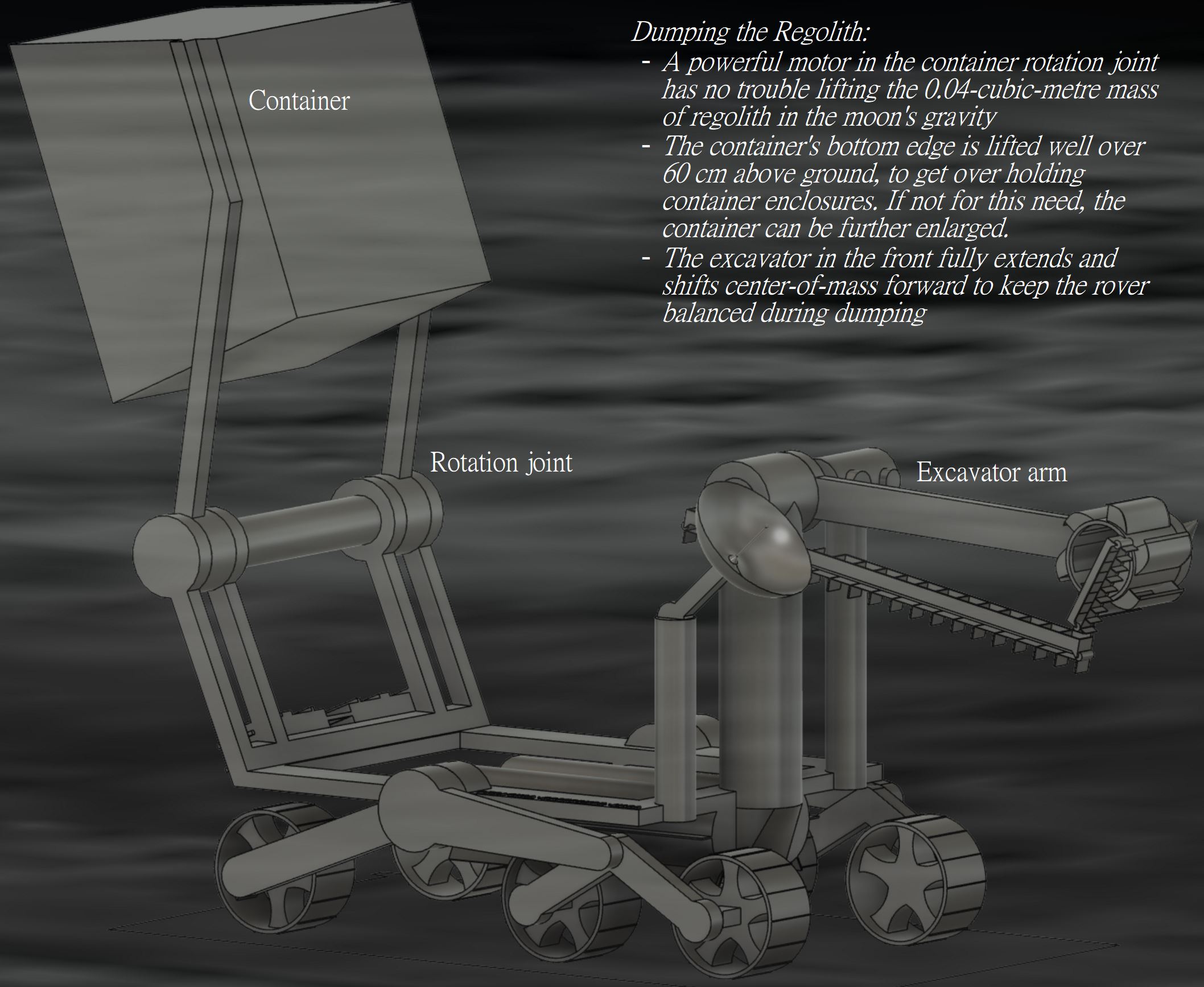
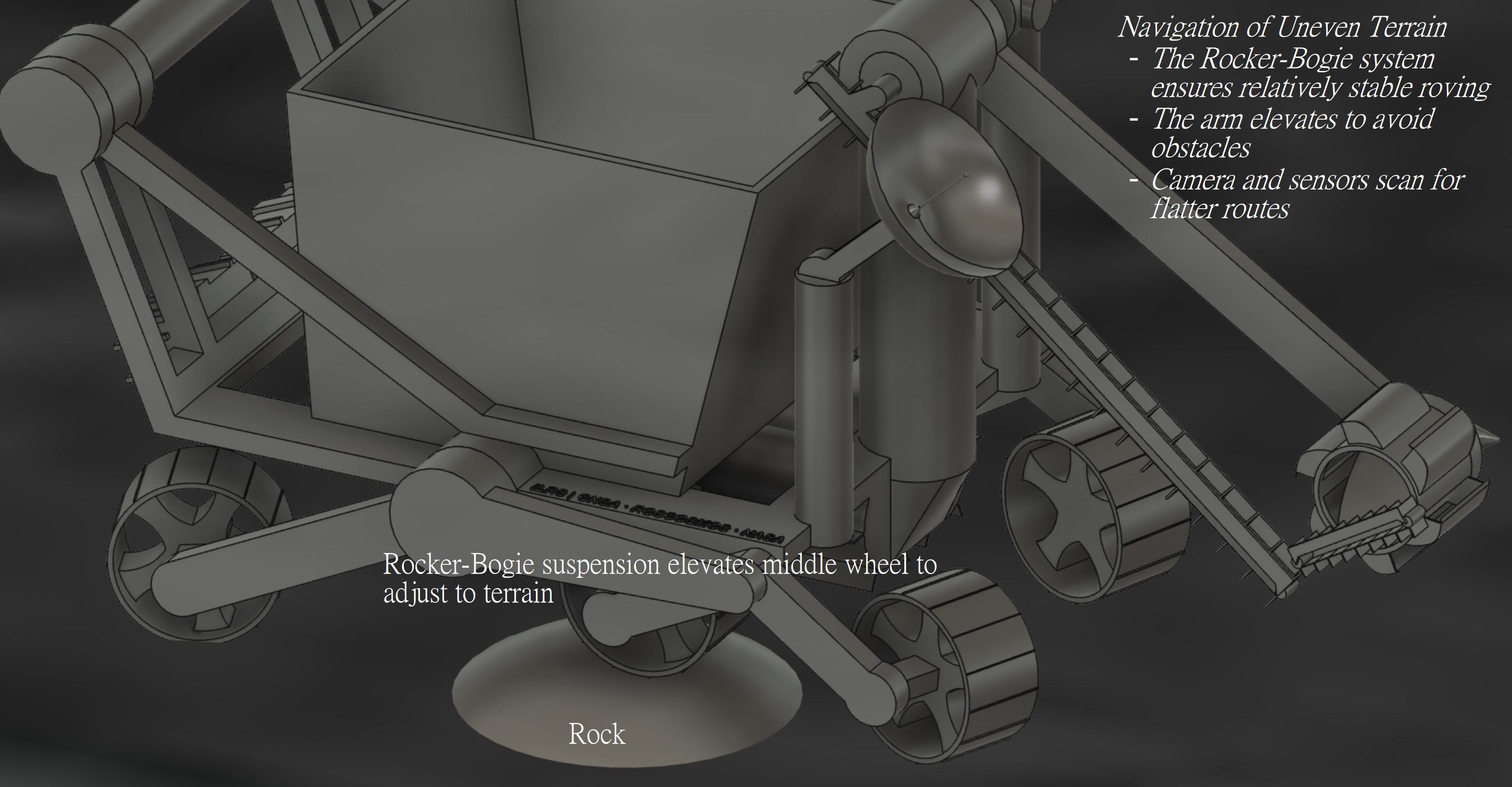
For physical design, Stardust digs lunar regolith of any hardness using a drill and a bucket-wheel excavator. Unlike grabbers, they always remain in contact with the ground while regolith enters Stardust’s container via conveyor belt, speeding up digging. Stardust moves on six electric-powered titanium wheels mounted on the tried-and-true Rocker-Bogie suspension system to easily move across rugged terrain.
In operations, Stardust rover is designed to maximize the amount of regolith carried. This saves time by reducing the trips needed.
As for lunar dust, Stardust uses embedded electrodes to generate electric fields around sensitive equipment/sensors/circuits/motors/joints to repel negatively-charged lunar dust, which does little harm to the general aluminium structure.
Stardust also offers other capabilities, like plutonium-RTG based permanent power supply, automated mapping system, and remote communication to satellites.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org