



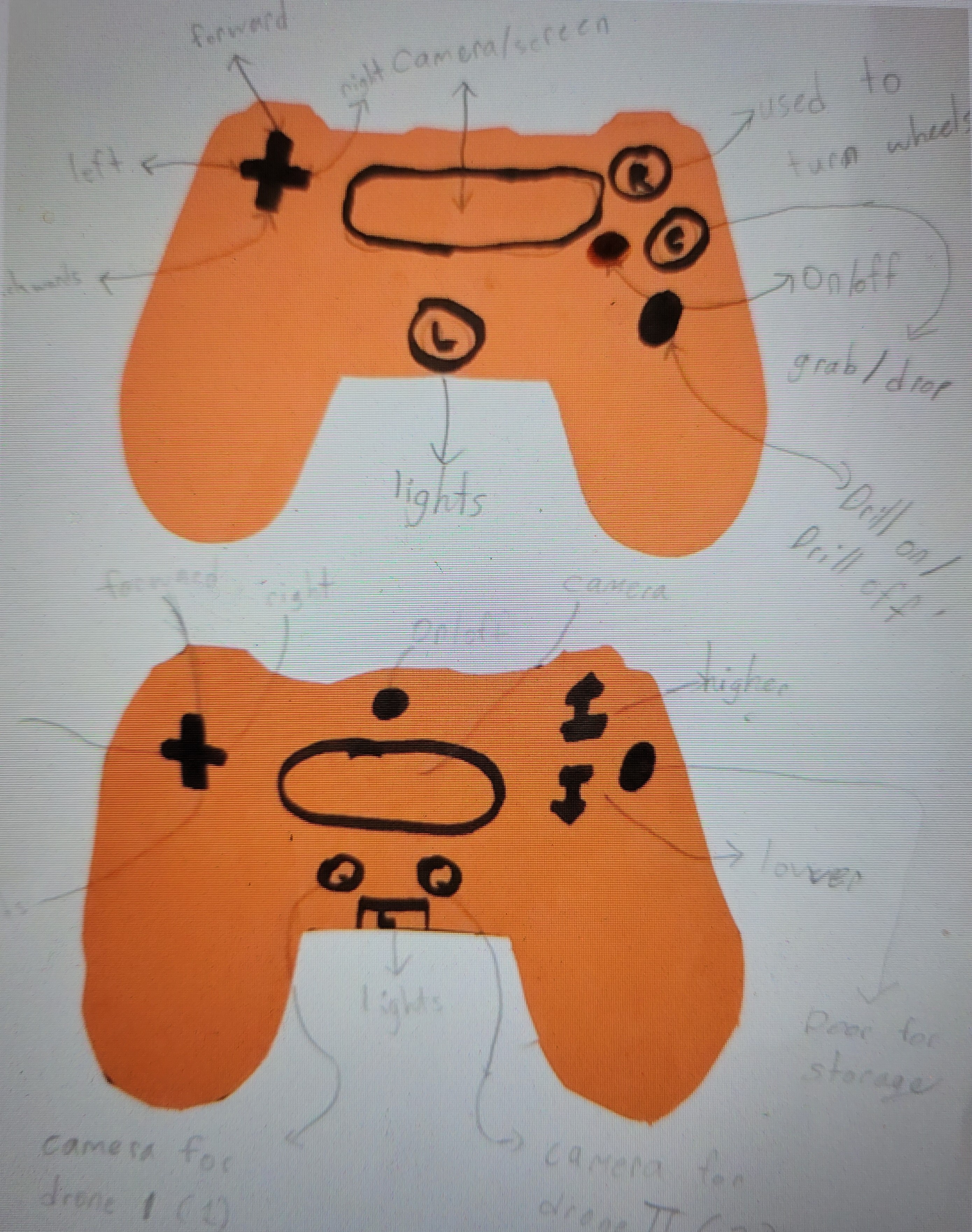
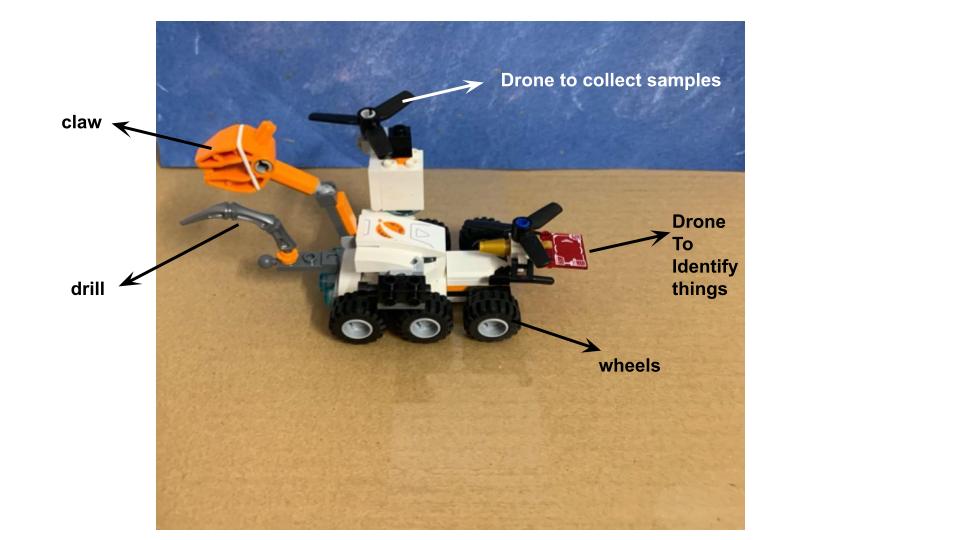
My rover has a drill and claw in the front. The claw can move 360 degrees. There are also blue headlights in the front. On one side there is a camera. On the other side, there is a drone to collect items. The posterior drone identifies items and sends photos and info about things it finds. The back of the drone has a camera and sensor. The sensor is to alert if a meteor is closeby, rocks are falling, etc. The drone and the rover both have backup power. There are six big wheels to help the rover move across rocks and craters. My rover runs on nuclear power in the form of RTG. I chose nuclear power because nuclear power lasts around 2 years. There is a remote controller, so the astronauts can stay at the landing site and control the rover.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org