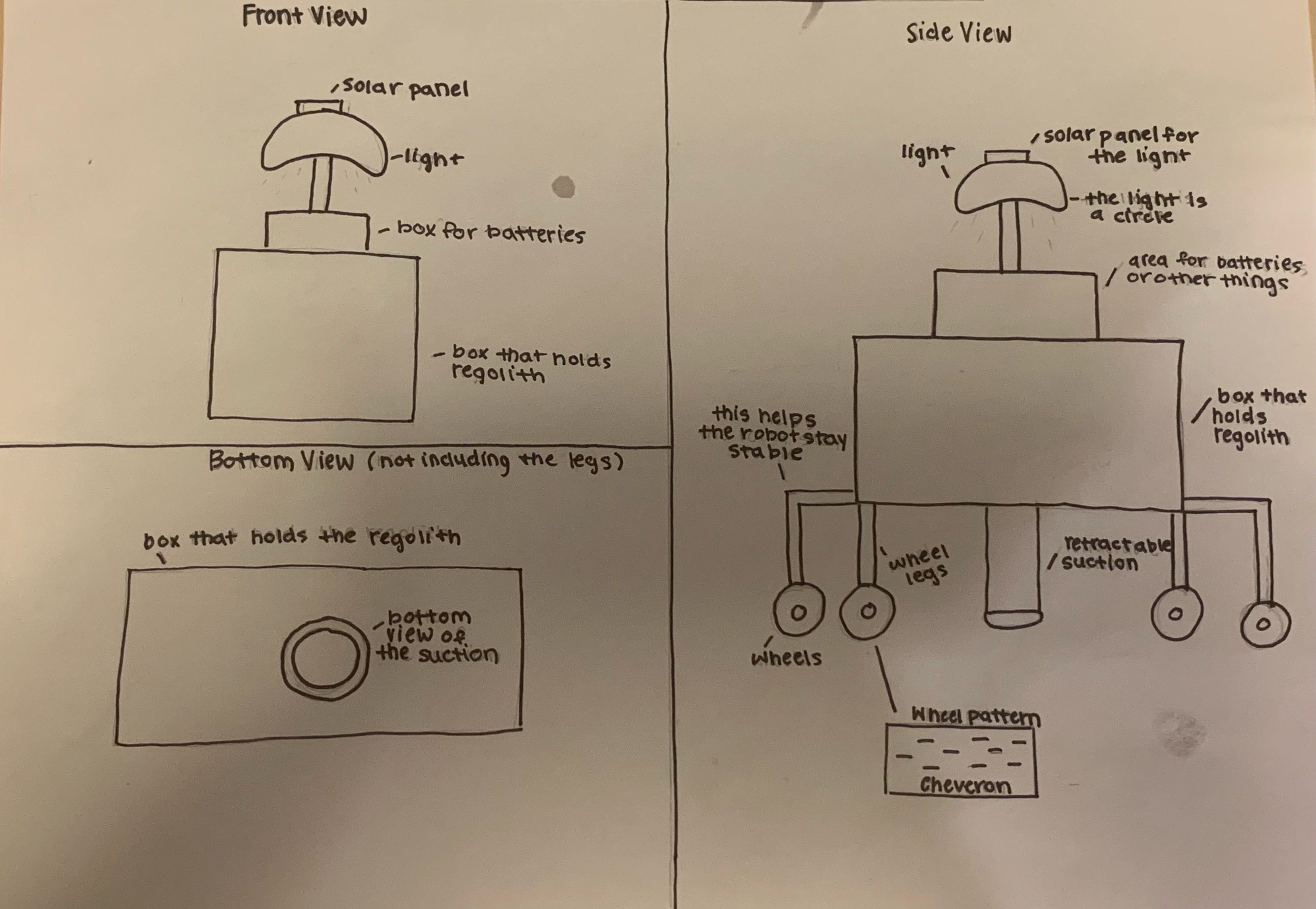
Atlas is remote controlled by an astronaut on the Moon while it moves, however it will operate autonomously when digging. It will use rechargeable Lithium-ion batteries and a charging dock to maintain power. For stability, there are two wheels in both the front and the back. One is diagonal facing straight ahead or behind, and the other is vertical under the robot. The speed of the robot can vary since it's being controlled and will dig at about 5-10 MPH. To maintain traction on the Moon, Atlas has chevron shaped wheels. The body is made of stainless steel to withstand high temperatures, Smooth metal already helps reduce dust, but it will also use an electrodynamic dust shield. Lastly, to dig the robot uses a suction vacuum, to dig up lunar regolith.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org