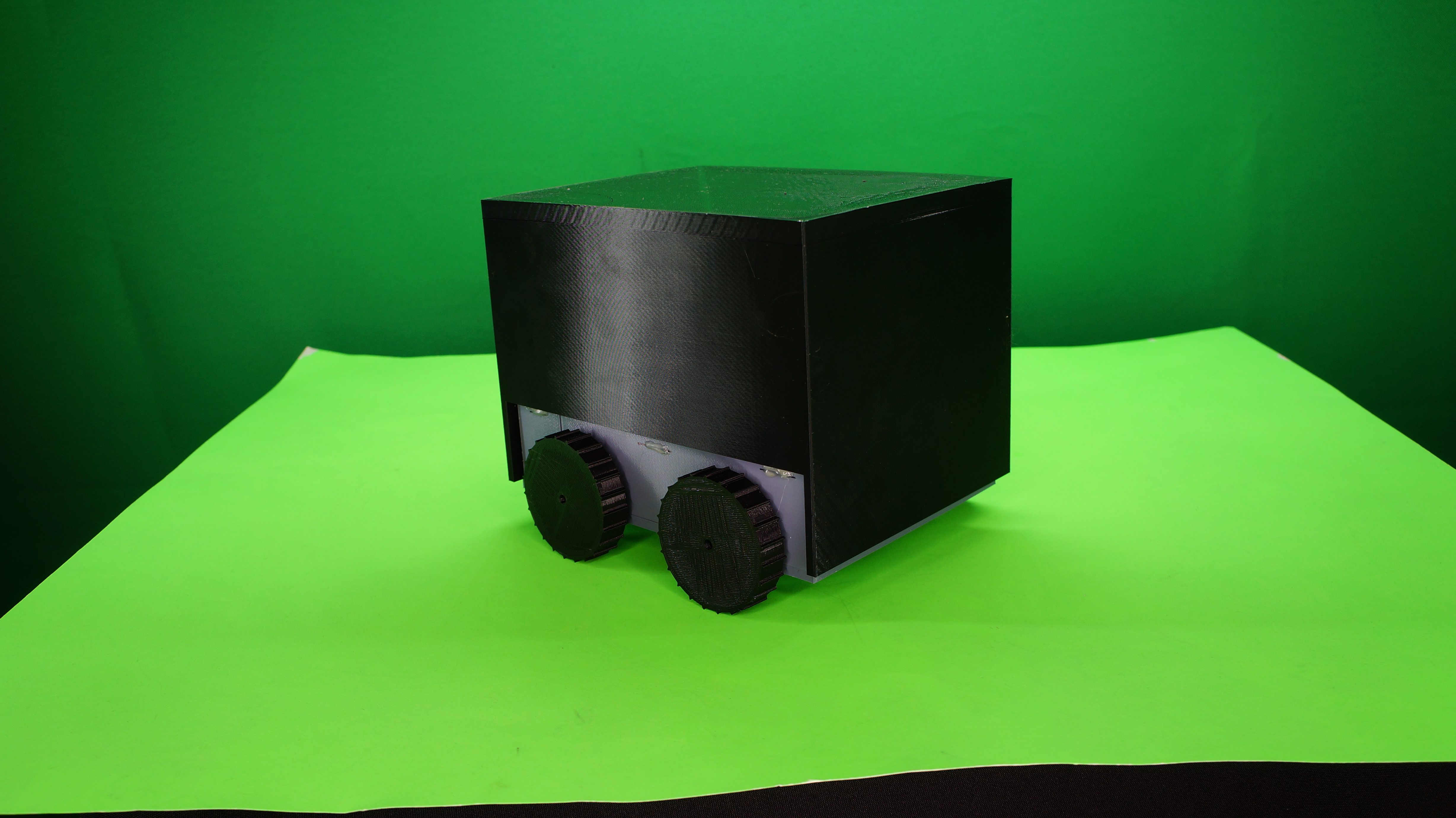
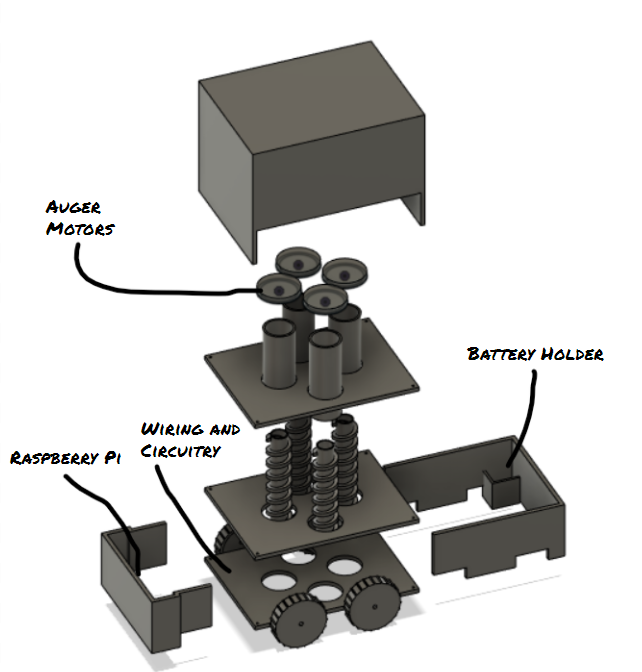
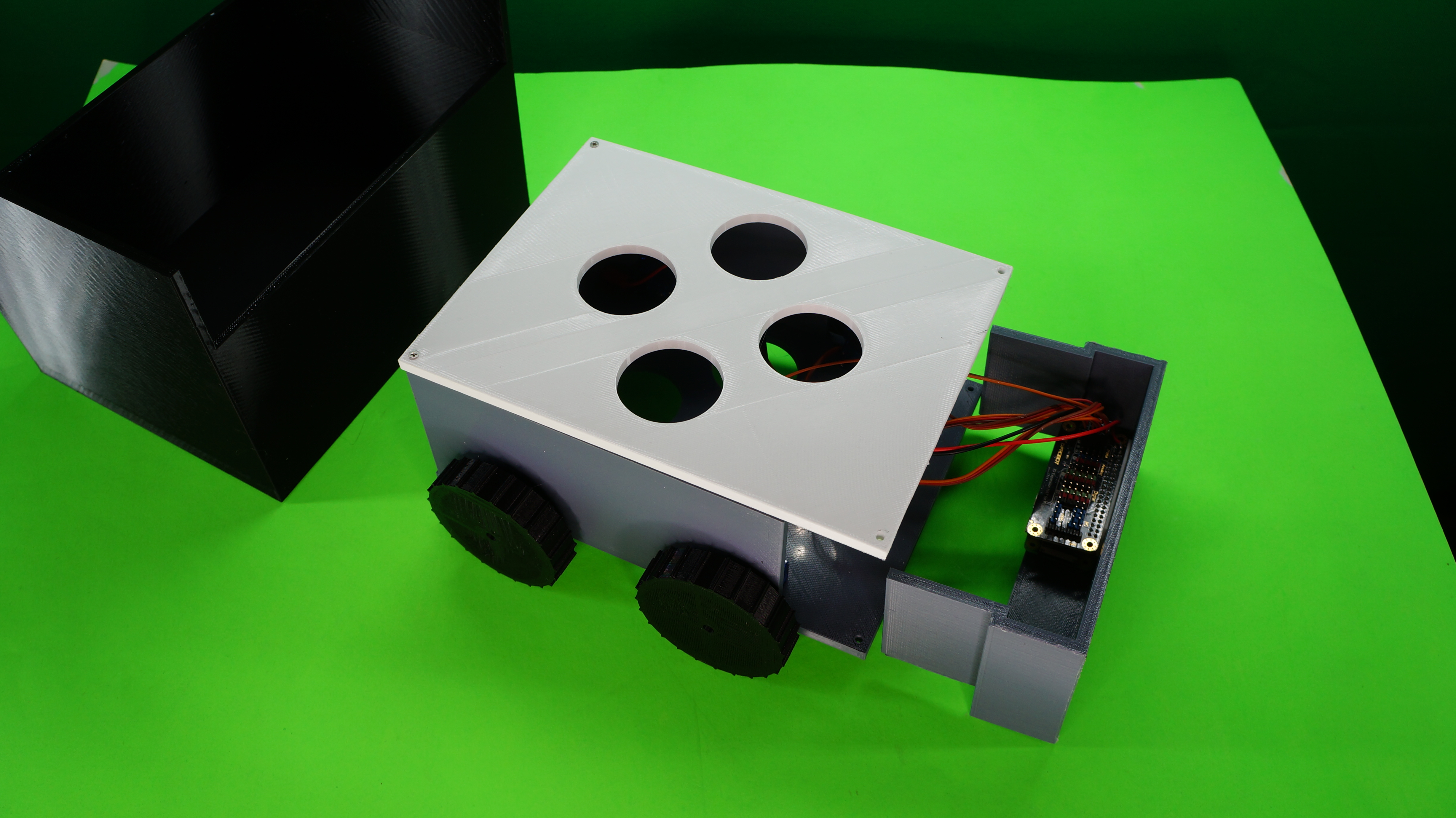
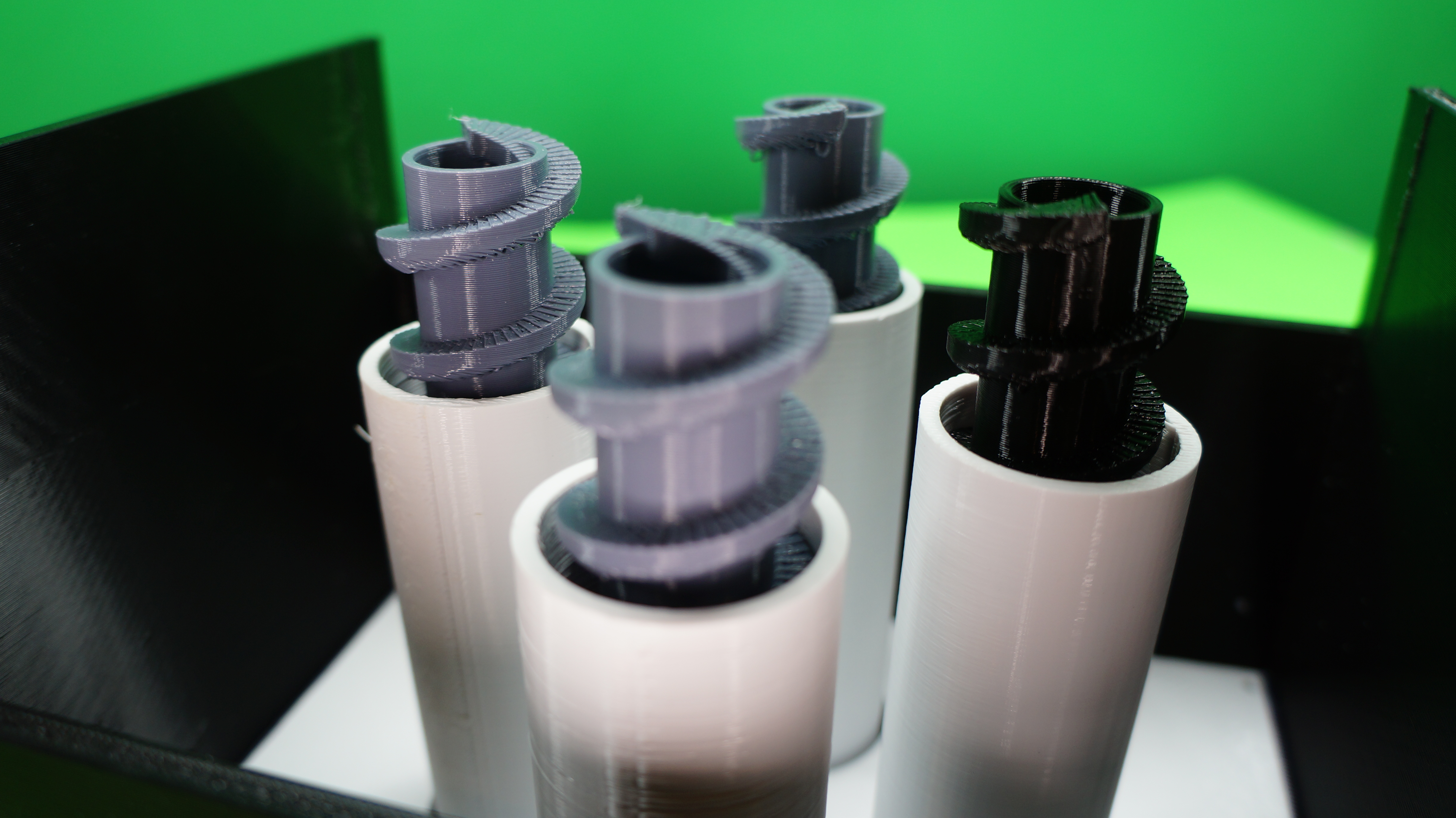
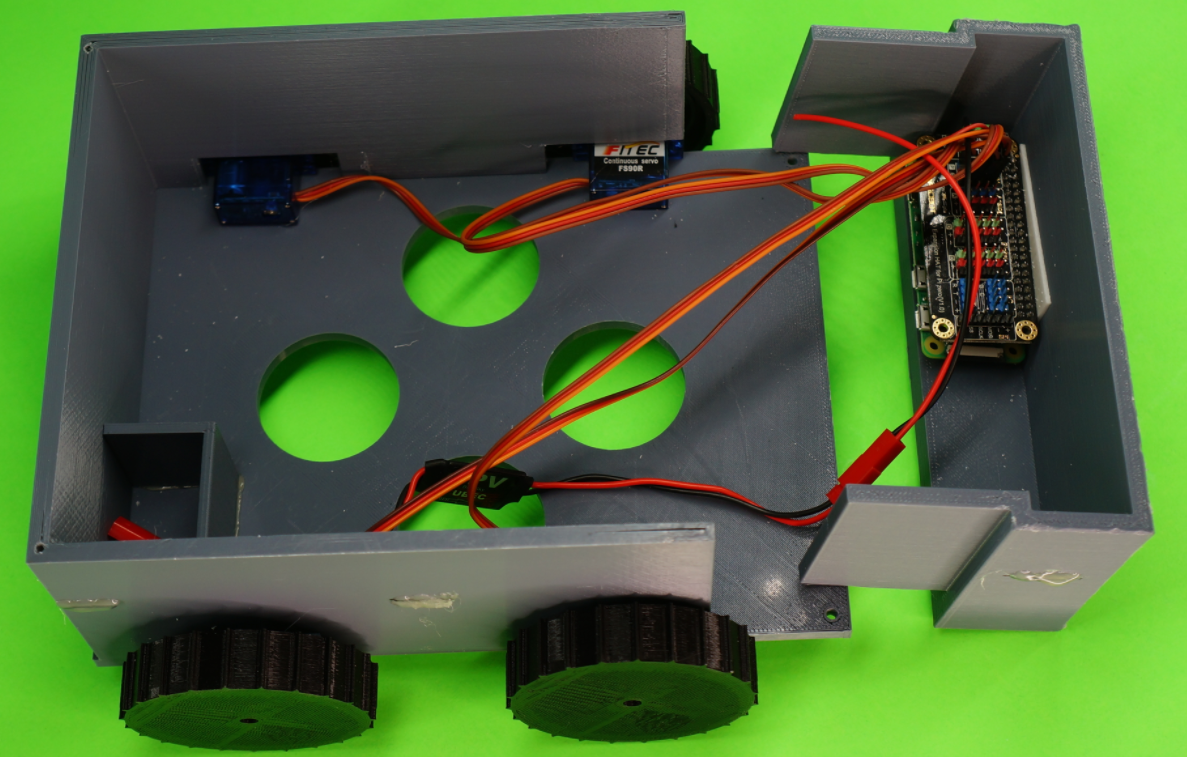
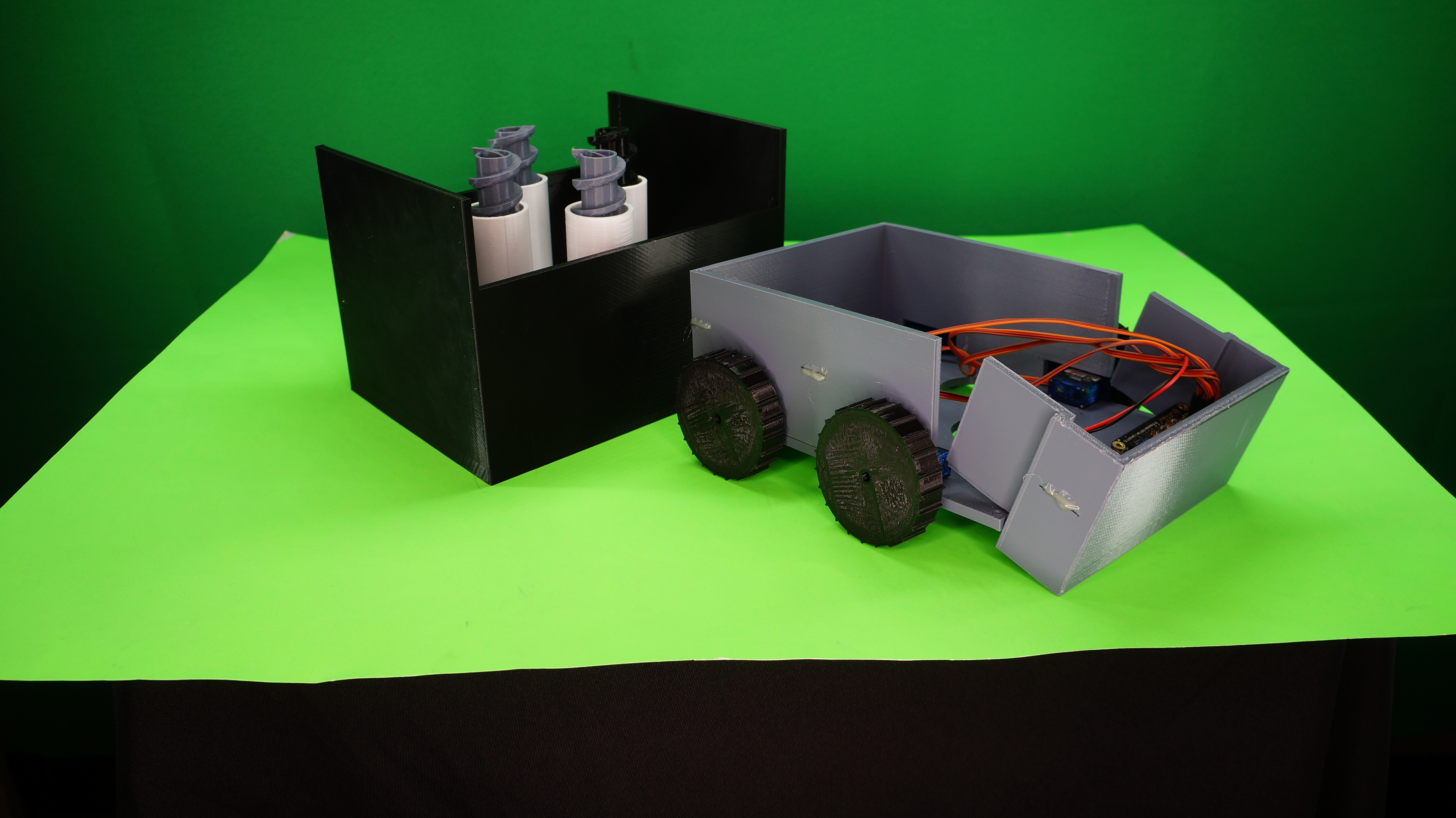
The Space Roomba rover will be a remote-controlled robot that collects lunar regolith samples using four augers and transports it to a container on the moon. It uses motorized wheels to move around. The design’s main tool will be four augers that can extend from the inside of the rover through the bottom. Using static electricity, we can take advantage of the sticking property of the lunar soil and have it cling to our augers, which we can then deposit to the lunar base. It will be battery-powered and will communicate with the controllers via radio signals. The design features à sliding drawer that contains the circuit board for easy access. It’s also relatively cheaper, using mostly servo motors, a Raspberry Pi, a receiver, à controller, and 3-D printed parts to work. Its boxy design also makes it good for storage, as it enables them to stack.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org