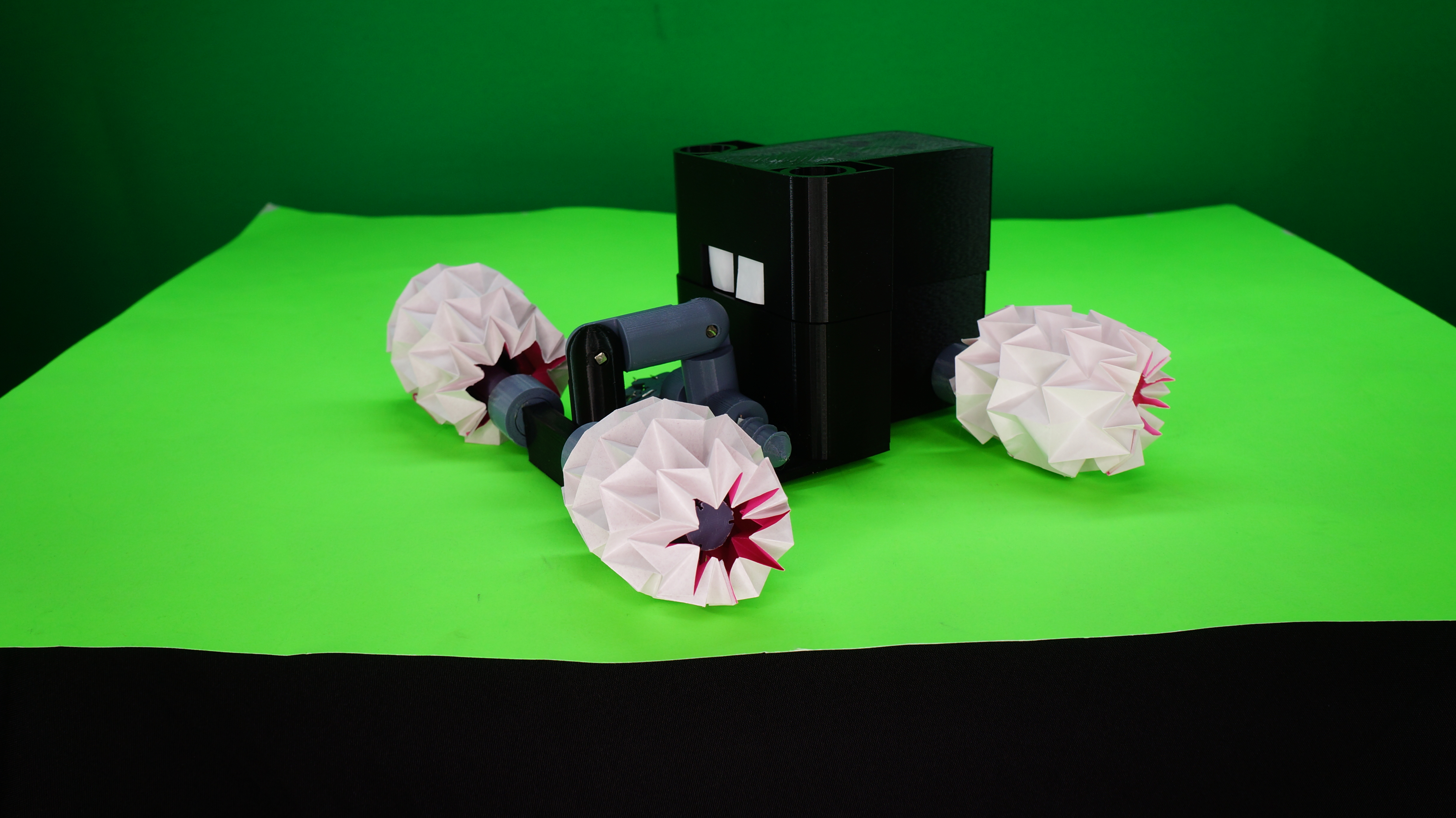
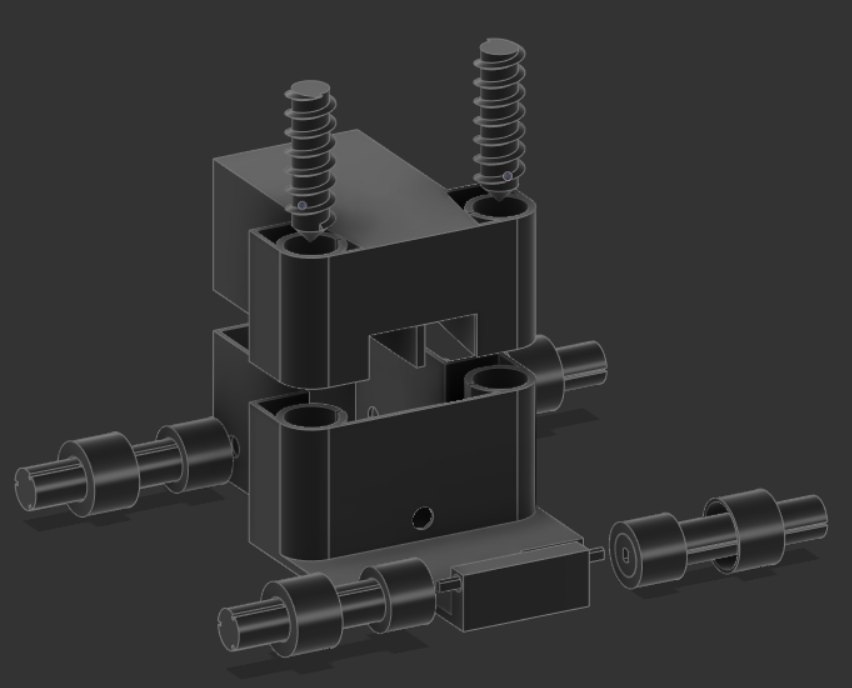
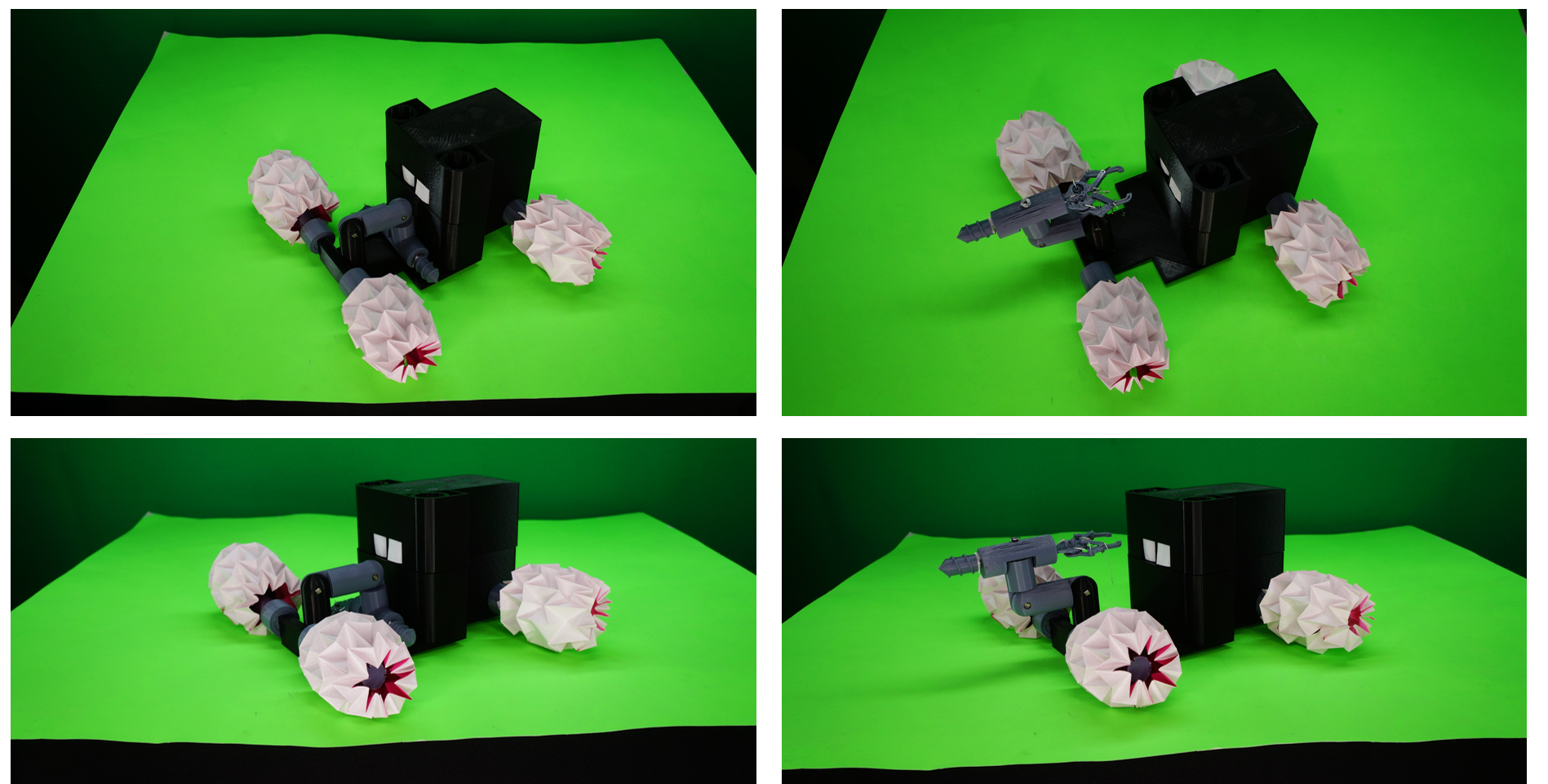
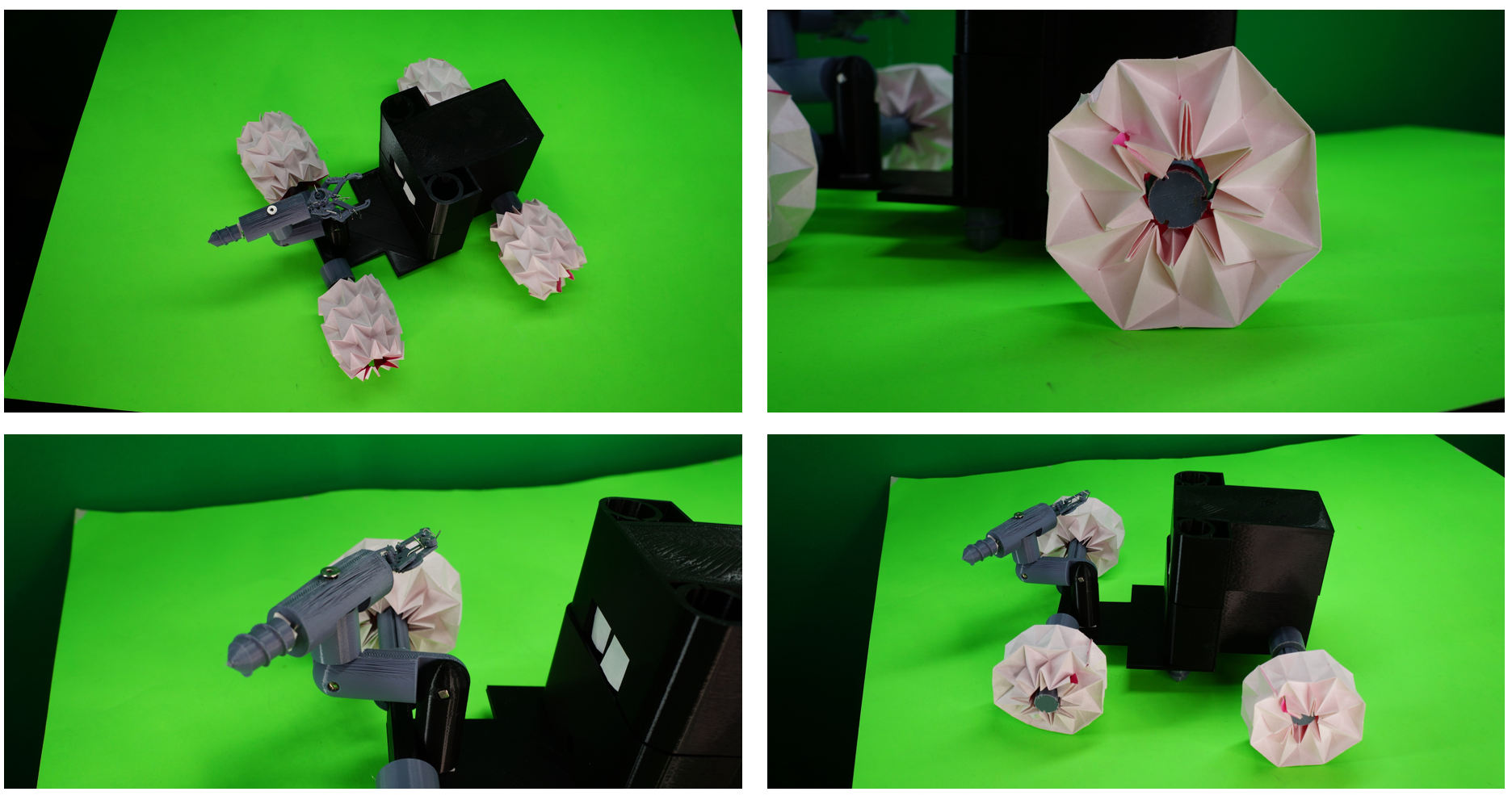
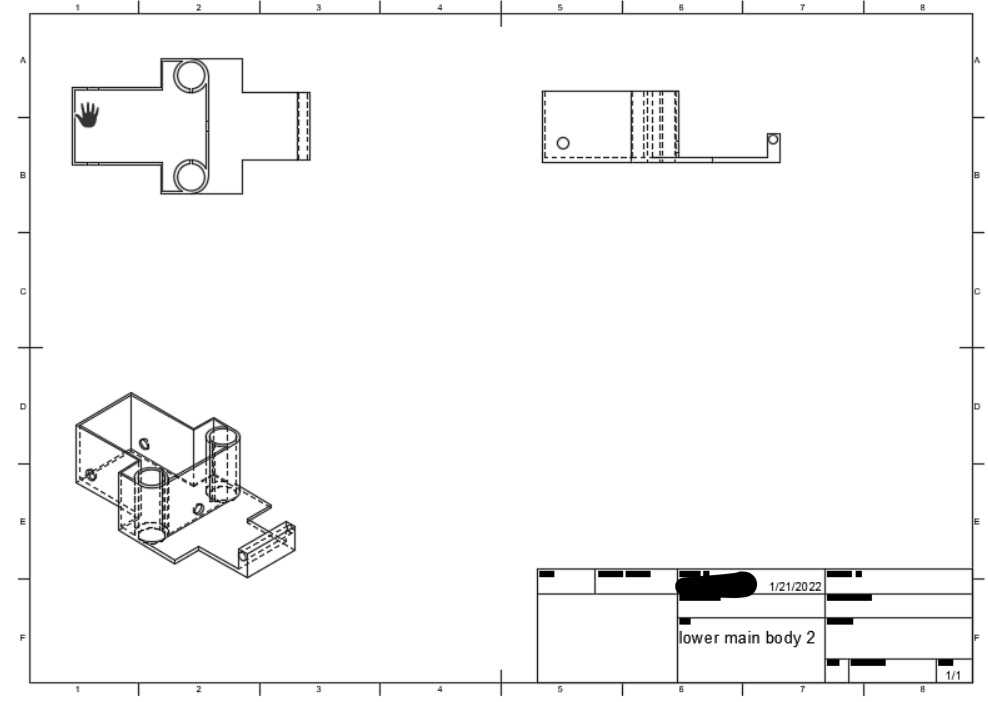
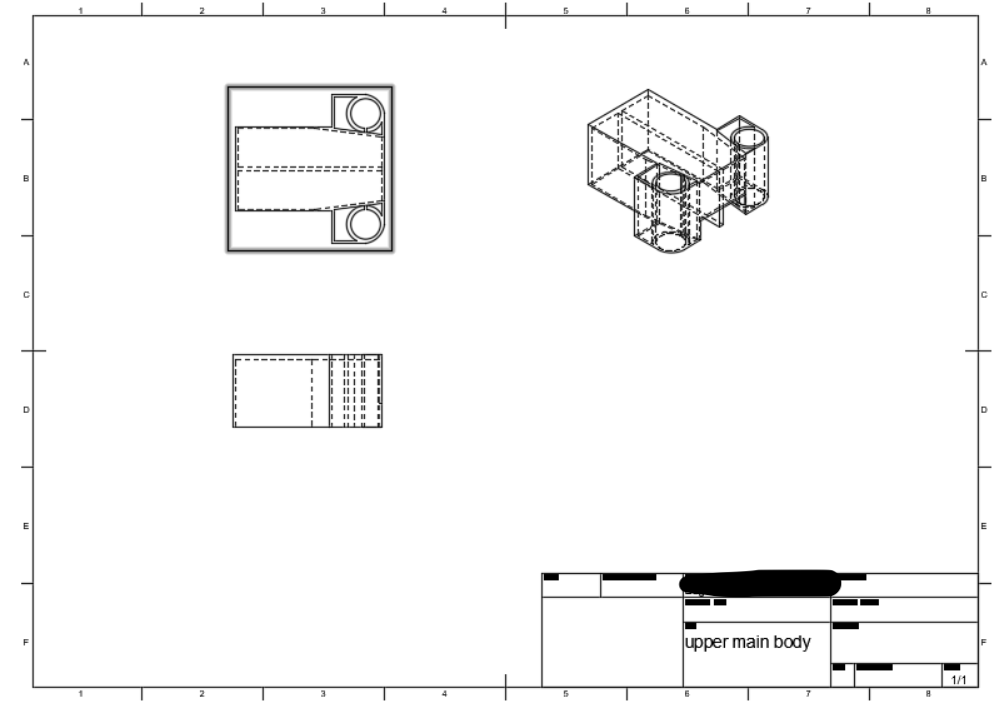
This lunar robot contains four wheels, a flexible arm at the front, and an auger at the each side of the robot. Wheels are motivated from origami, it can change the height and shape, and can have two modes; one for low and one for high. Also, it can adjust the level of the robot on each wheels, so it can make the robot be flat on the slope. As a result, it can make the augers puncture in balanced condition. Since the augers keep holding the robot on the ground, robot arm that has joints and a drill and a hand at the end can move the robot arm, break and collect the ice and the minerals on the moon surface. Robot has walls that separate the motors and mainboards from the dusts in the moon.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org