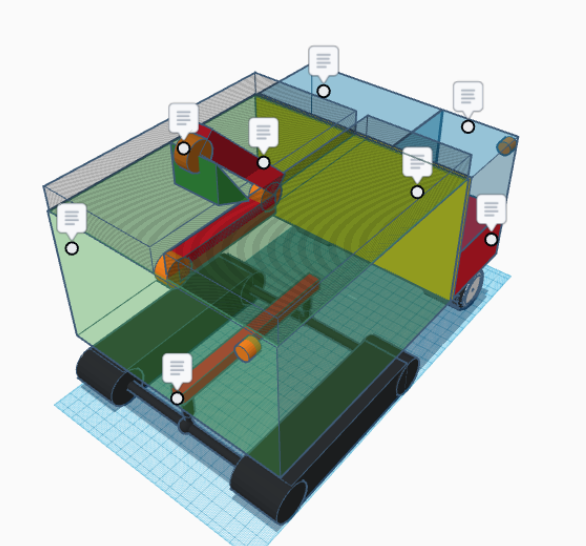
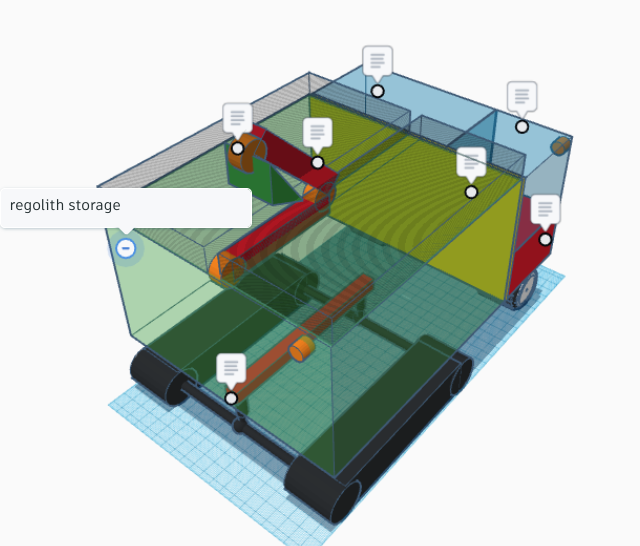
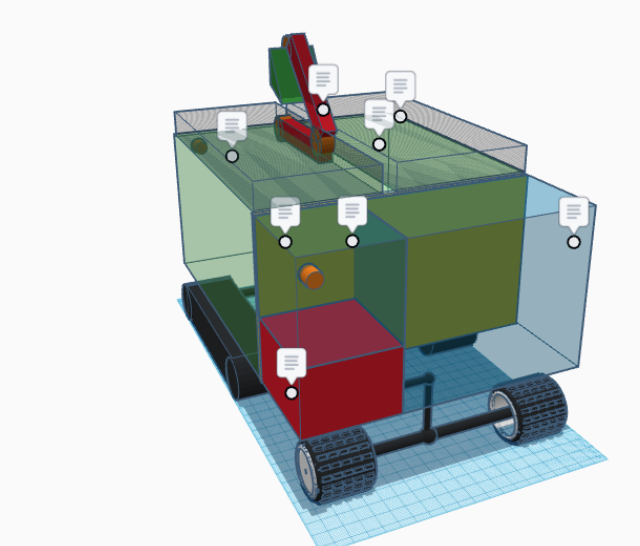
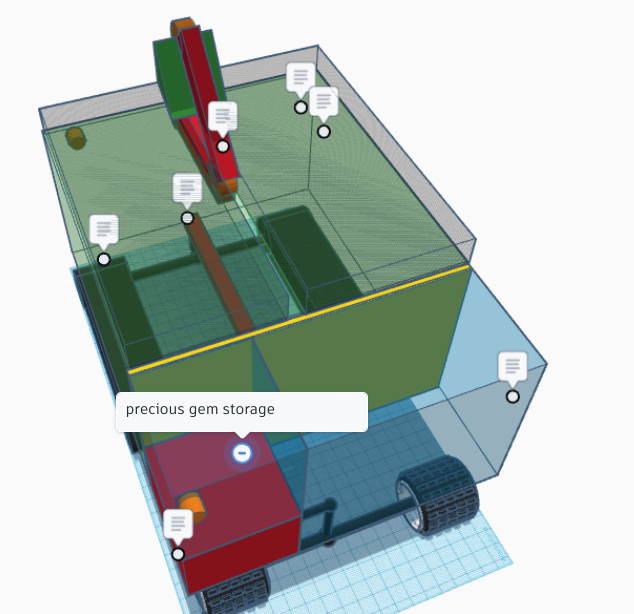
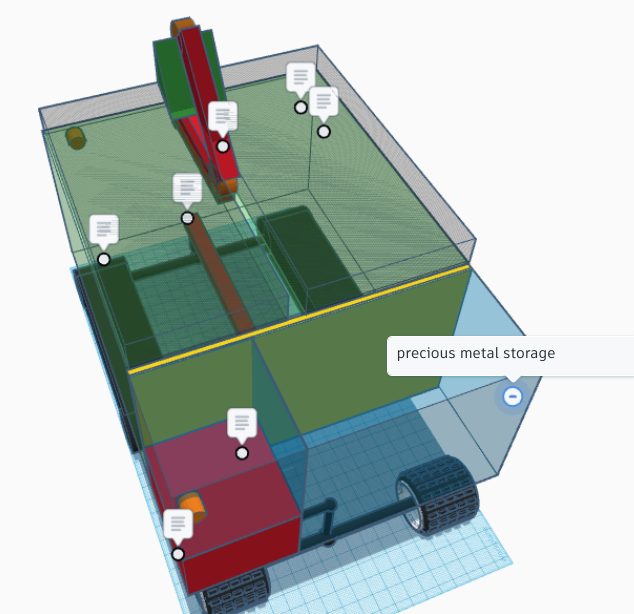
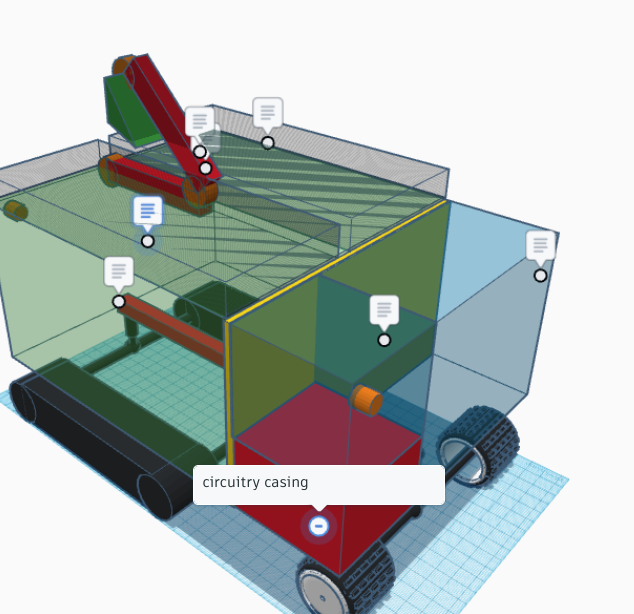
Hermes is designed to be 1 ½ ft. x 2 ft. x 1 ft., the design includes, 55 volt solar panels (x2), a robotic arm, 2 treads, 2 wheels (in the front), a regolith storage space, a precious metal storage space, a precious gem storage space, an industrial brush dc motor, 7 axles, 12 tooth gears (x2), 6 tooth gears (x3), and 2 cameras. It is designed to be made out of aluminum honeycomb panels. The front wheels will be used to provide precise steering, and the back treads are designed to provide the speed needed to get from the facilities to the regolith mining site. Hermes will have 2 modes, autonomous, and controlled, the controlled mode will include a transmitter/receiver aboard the service module, a laptop computer at the facility, for the operator, and a transmitter/receiver aboard the Hermes rover.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org