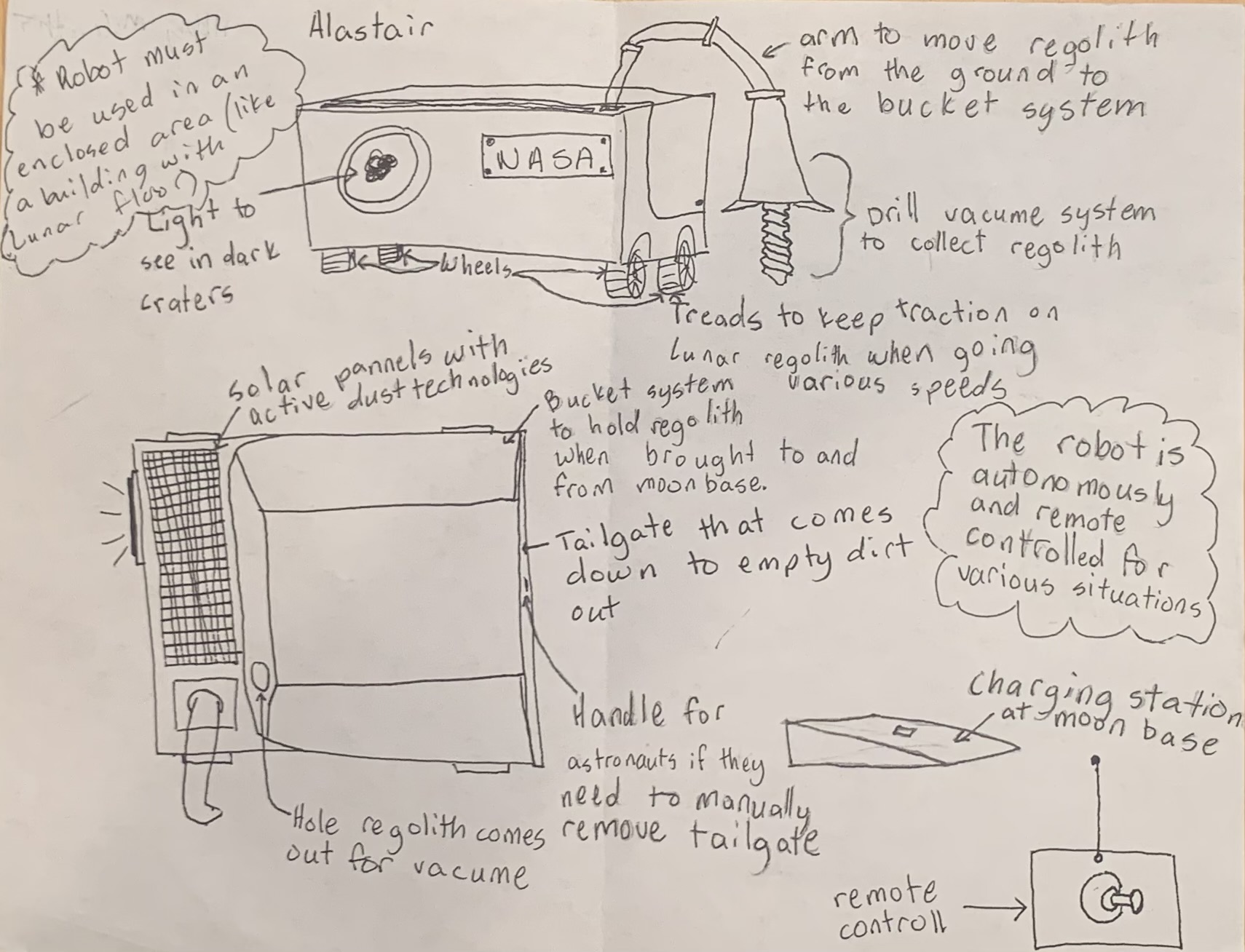
The rover will have four wheels with treads to stay in balance and not tip over which holds up a rectangular base. This robot will have a bucket which will carry the lunar regolith to and from the Moon base. A vacuum and drill will be used to pick up the regolith and put into a carrier on the back of the rover. It will have varying speeds for when it has regolith or when it doesn’t so nothing spills out and it can get back to the excavation site quickly. Active dust technologies will surround the mechanics and moving parts, so no dust gets in the way. Solar panels will power the rover as well as a backup battery and a charging station at the moon base. The robot will be controlled autonomously and remote controlled depending on what’s best for the situation.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org