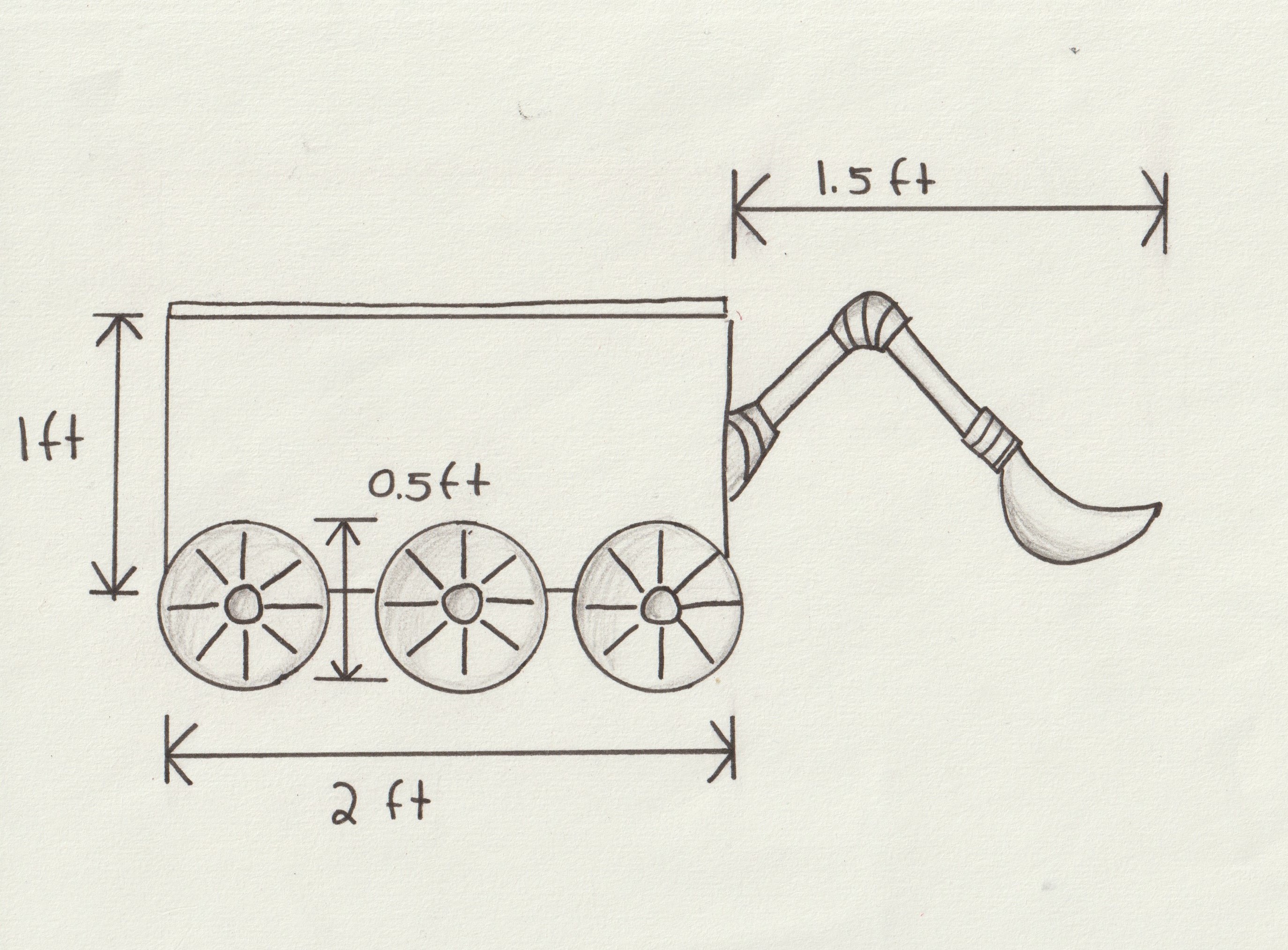
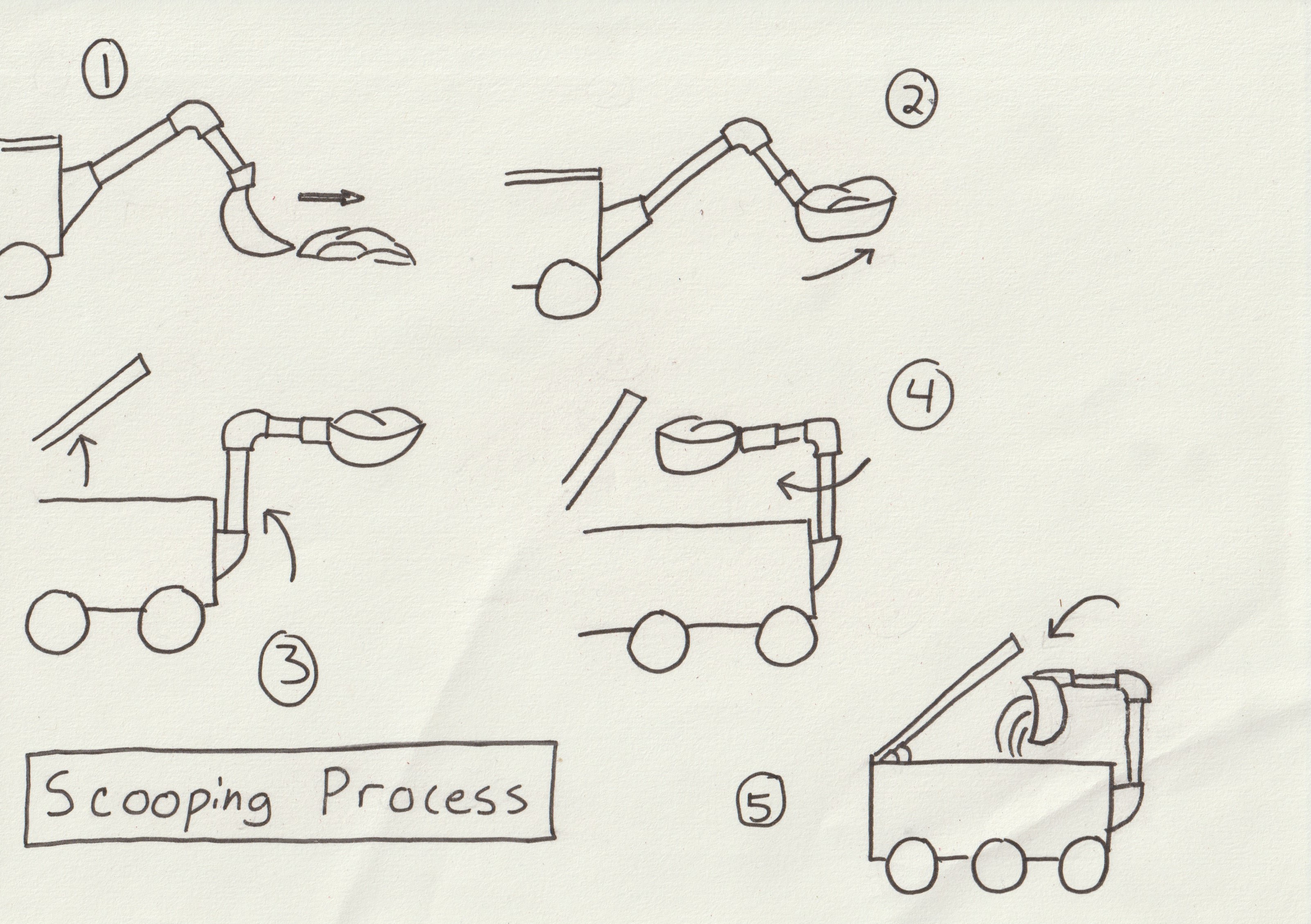
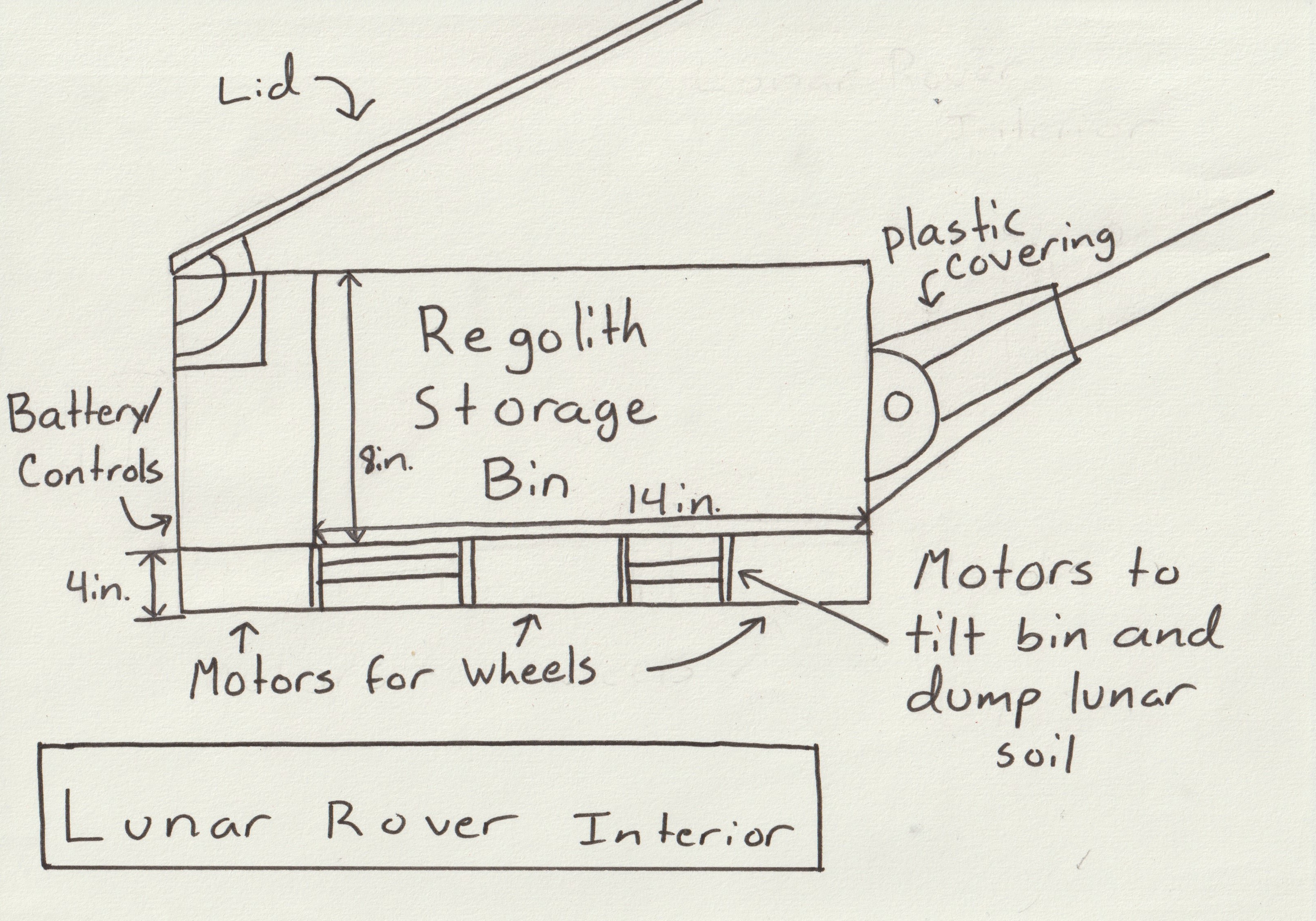
My rover design includes a front scoop to transfer lunar soil into its storage bin. The rover should be able to move about 6.1 cubic feet of lunar soil per trip. It has six wheels, to provide stability, that are spoked with a wire mesh rim, similar to those of the lunar rover, Lunokhod 1, to allow it to traverse loose and compact lunar soil. Because the amount of sunlight that reaches the lunar south pole will not be adequate for solar panels to provide power, my rover is powered completely by a lithium-ion battery, like the Mars rovers, Spirit and Opportunity, and will be recharged each time the rover returns to the Artemis base. The rover will use the selenic coordinate system to travel to and dig at pre-programmed coordinates. Flexible plastic will cover the joints of the scoop to prevent lunar dust from impacting the rover's performance.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org