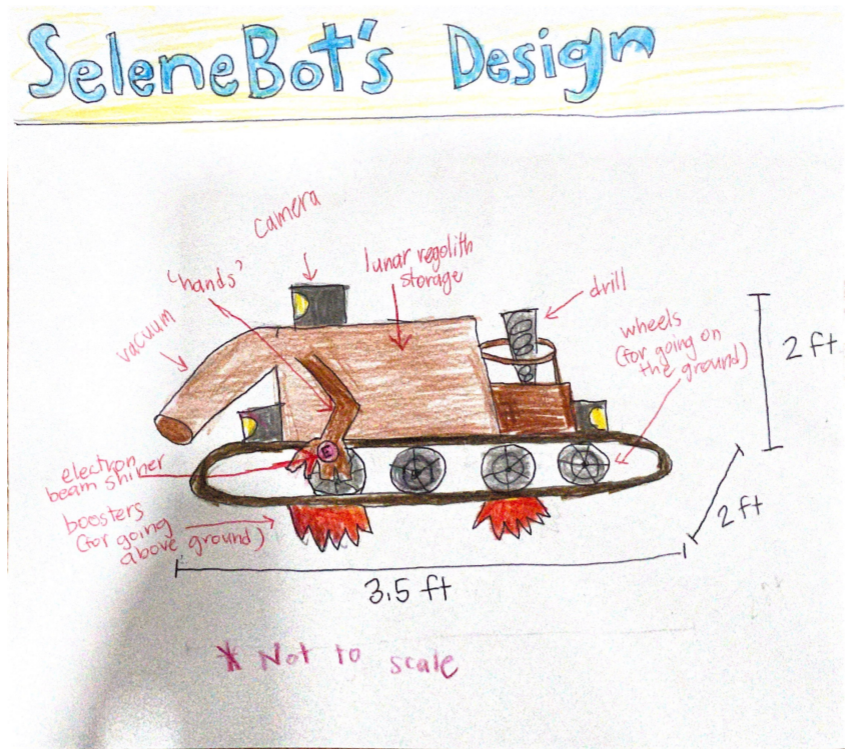
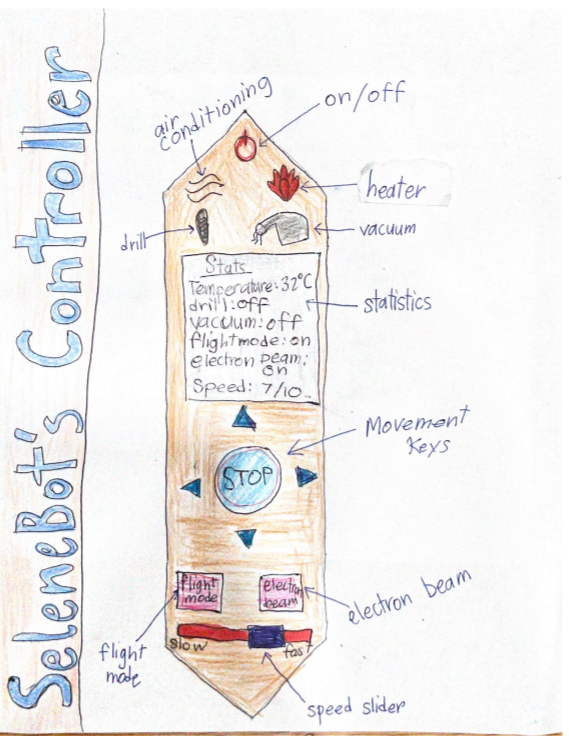
I designed the SeleneBot. It will be powered by solar panels. SeleneBot is 3.5ft x 2ft x 2ft. It’s speed and movement can be controlled by an astronaut on the moon. It will have cameras to provide scientists with high-resolution images. The wheels will have grip. SeleneBot will be able to fly so it won’t kick up lunar soil. A cover will be placed on it when it isn’t moving for protection from lunar dust. SeleneBot can be used for multiple excavations. To handle extreme temperatures, there will be a heating and air conditioning system, which can be controlled by an astronaut. The robot will have a vacuum to suck up lunar regolith, and it will have a drill to dig into the lunar soil. To remove lunar regolith, SeleneBot will shine beams of electrons from both of its ‘hands’, which will destroy the lunar regolith on the robot.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org