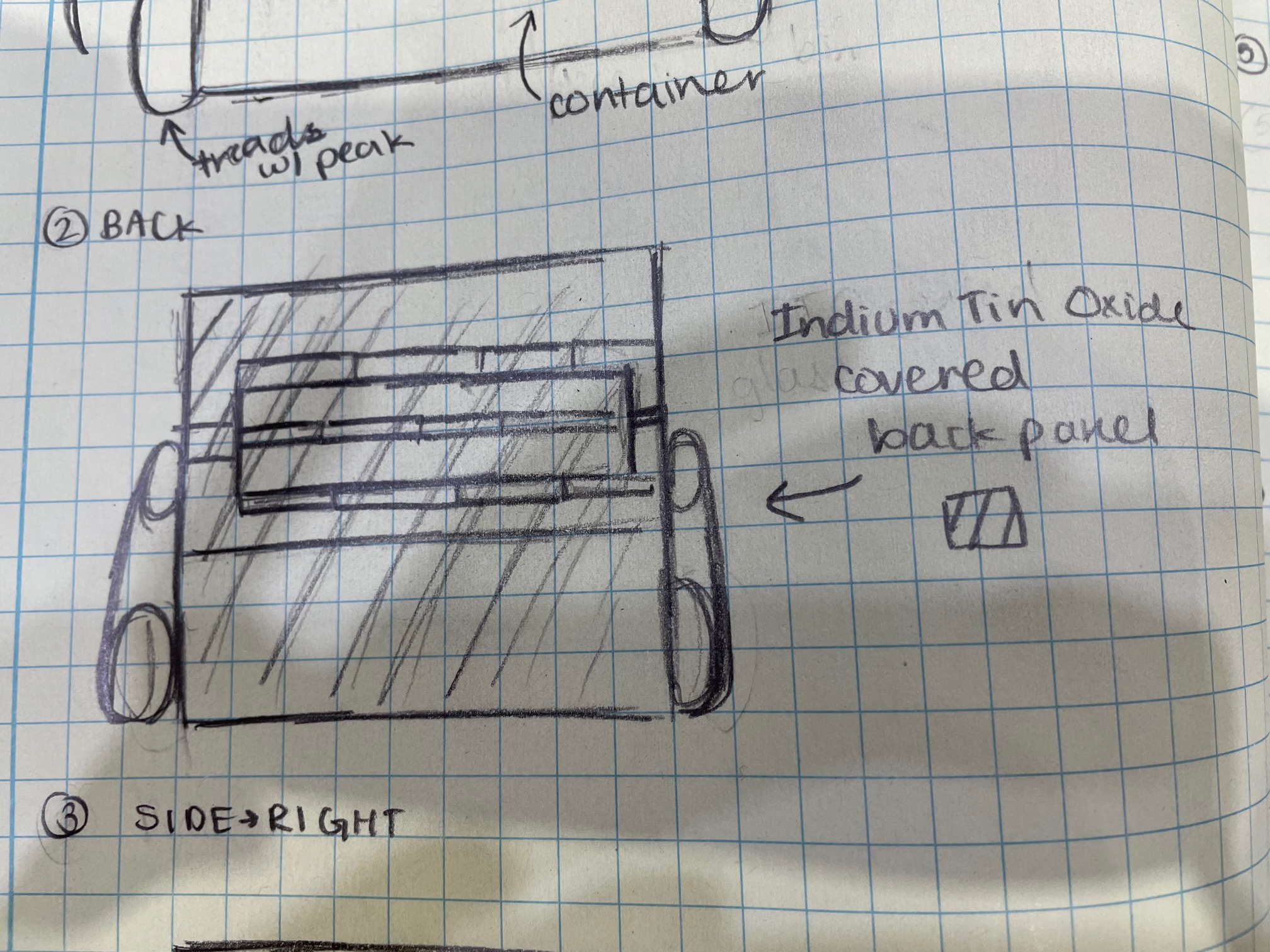
My lunabot, Leo1020’s, design will allow it to dig and move regolith without posing a damage to its mechanical system or the astronauts working with it. Leo1020 is a cube; its intake system is composed of a giant rod with scoops and hollow chambers. The scoops will dig into the regolith, and once all they are filled, they will output the soil into a container. Indium Tin Oxide coatings would minimize the electrostatic energy of the particulates. In addition, side panels will produce an electrical current so that the charged regolith repels. The bottom and top panels would be open so that dust particles won’t be trapped. The lunabot won’t carry much dust but will make more trips- this way it can be monitored for damages and fixed before a problem arises. The robot will move using triangular shaped treads (peaks) so that any particles will escape from the system.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org