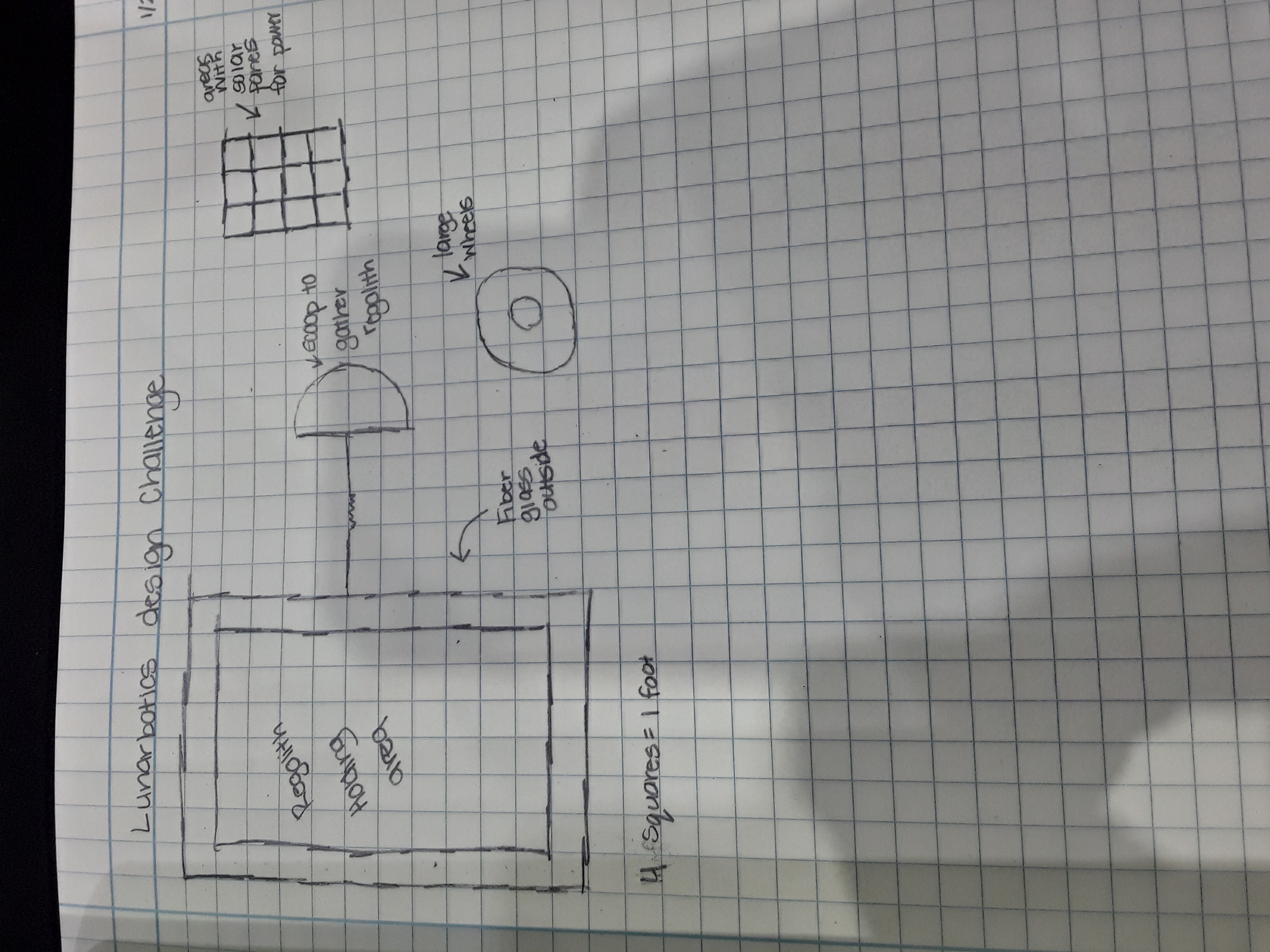
In this challenge we are tasked with designing a robot that can transport regolith from one lunar pole to a holding base near the future Artemis moon base, and is able to support itself on the moon in harsh conditions such as low gravity and abrasive regolith. In my robot design, there is a shovel piece on the side that will be able to pick up the regolith. This piece will also allow for the transport of regolith, along with an area within the robot that will be able to hold regolith, allowing for various amounts of regolith to be transported. The large wheels and fiberglass outside of the robot will allow for easier movement on the moon and the fiberglass allows for less static clinging, and the fiberglass can also be repaired using materials found on the moon, making it easier to repair without having to bring extra resources.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org