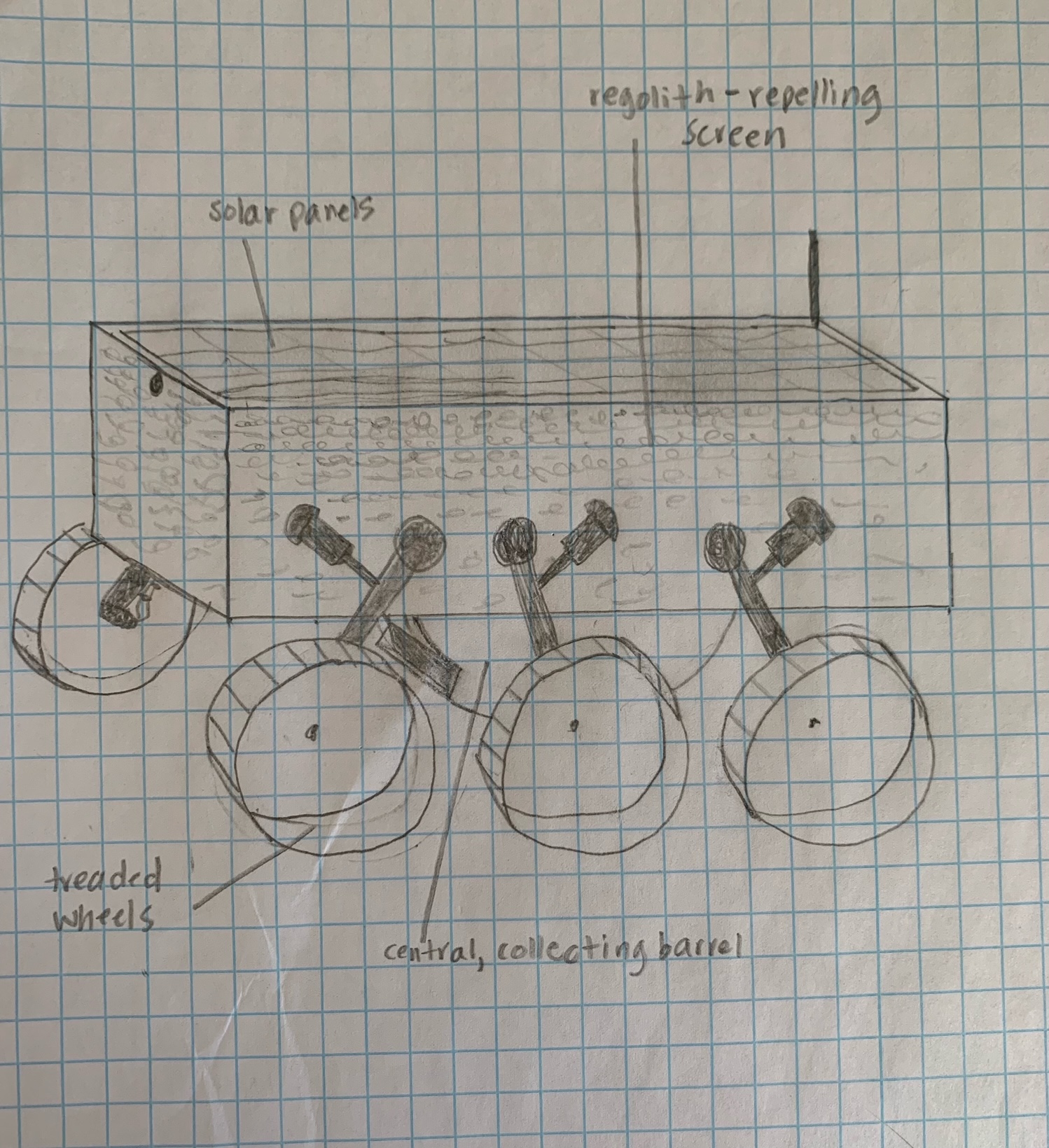
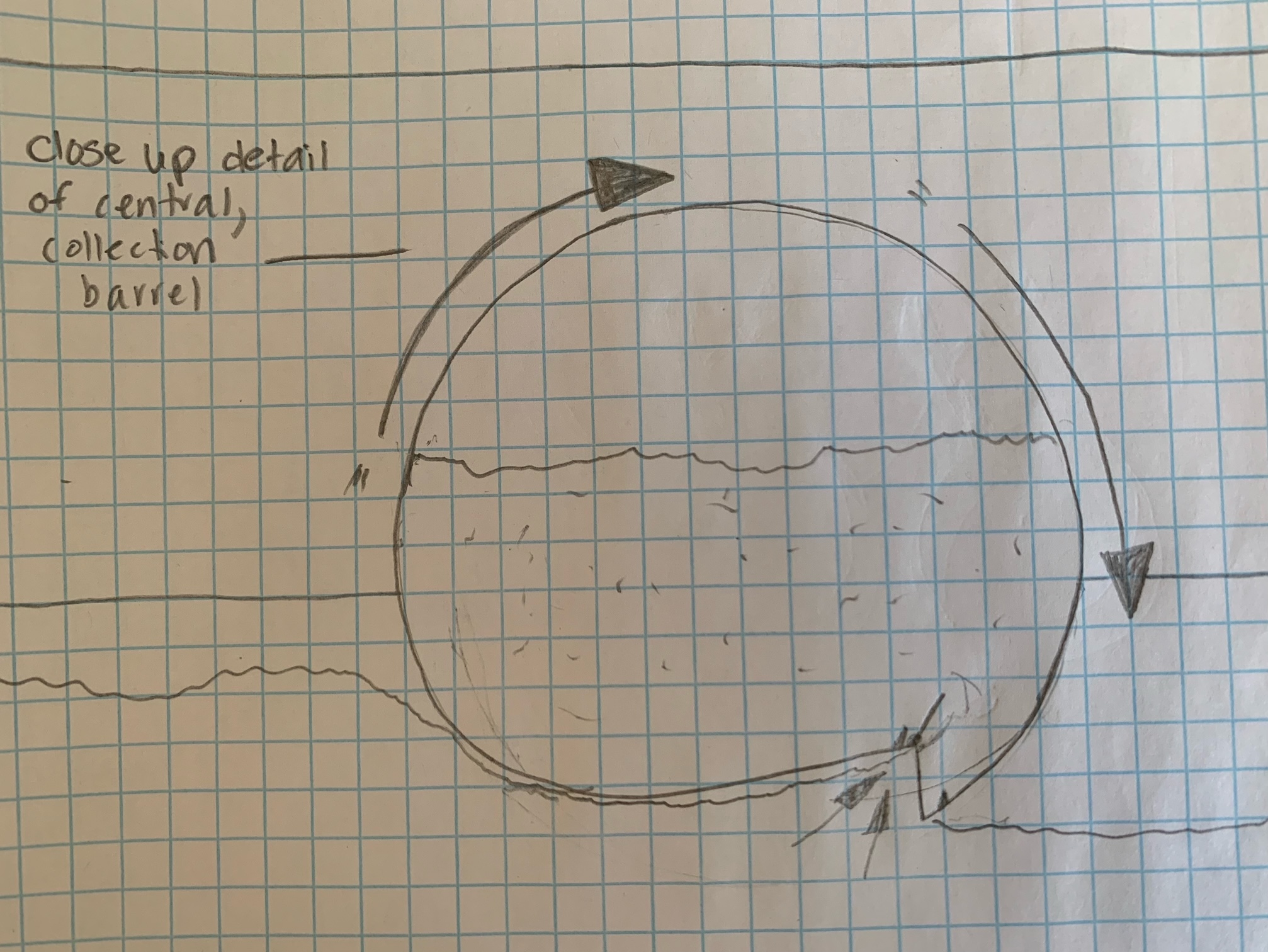
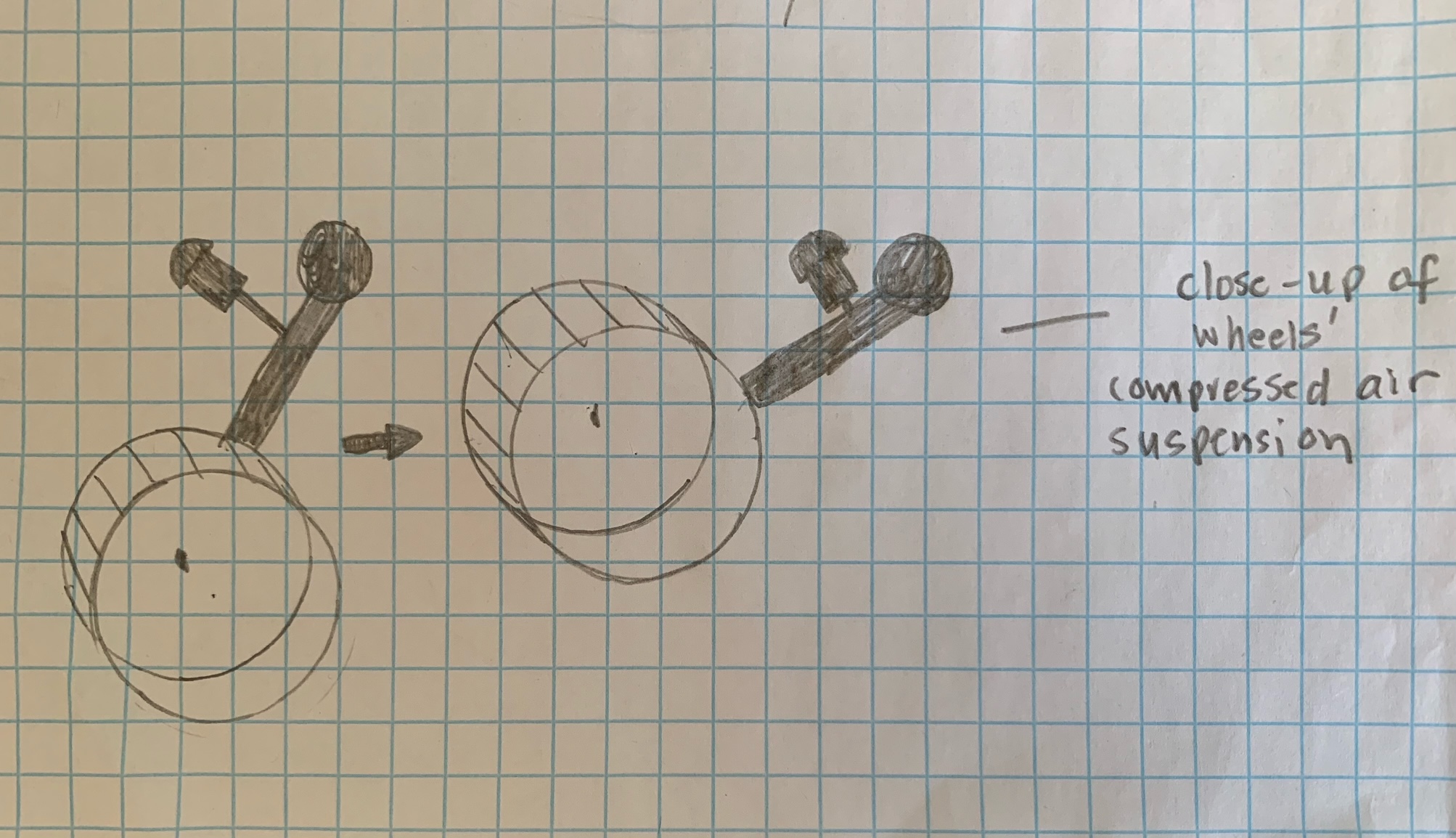
The ARC robot is designed to slowly and steadily dig and deliver regolith. Six treaded wheels provide stability and traction, and the central, cylindrical barrel (for collecting and transporting regolith) creates a balanced center of mass. The solar panel covered surface utilizes South Pole sunlight, and a rim location provides direct satellite communication lines for remote controls. A transparent, regolith-repelling screen, woven of electrocharged metal (to repel) and threading (to catch sharp particles) lines the robot's surfaces. A compressed air suspension system lowers the robot's body to the dig site surface. A high-torque motor turns the central barrel, which scoops regolith into itself using a PacMan shaped opening. When pressure-sensor-equipped joints detect the barrel is 3/4 full, the suspension system raises the body, the robot motors to the deposit site, and the motor turns the barrel in reverse - depositing the regolith.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org