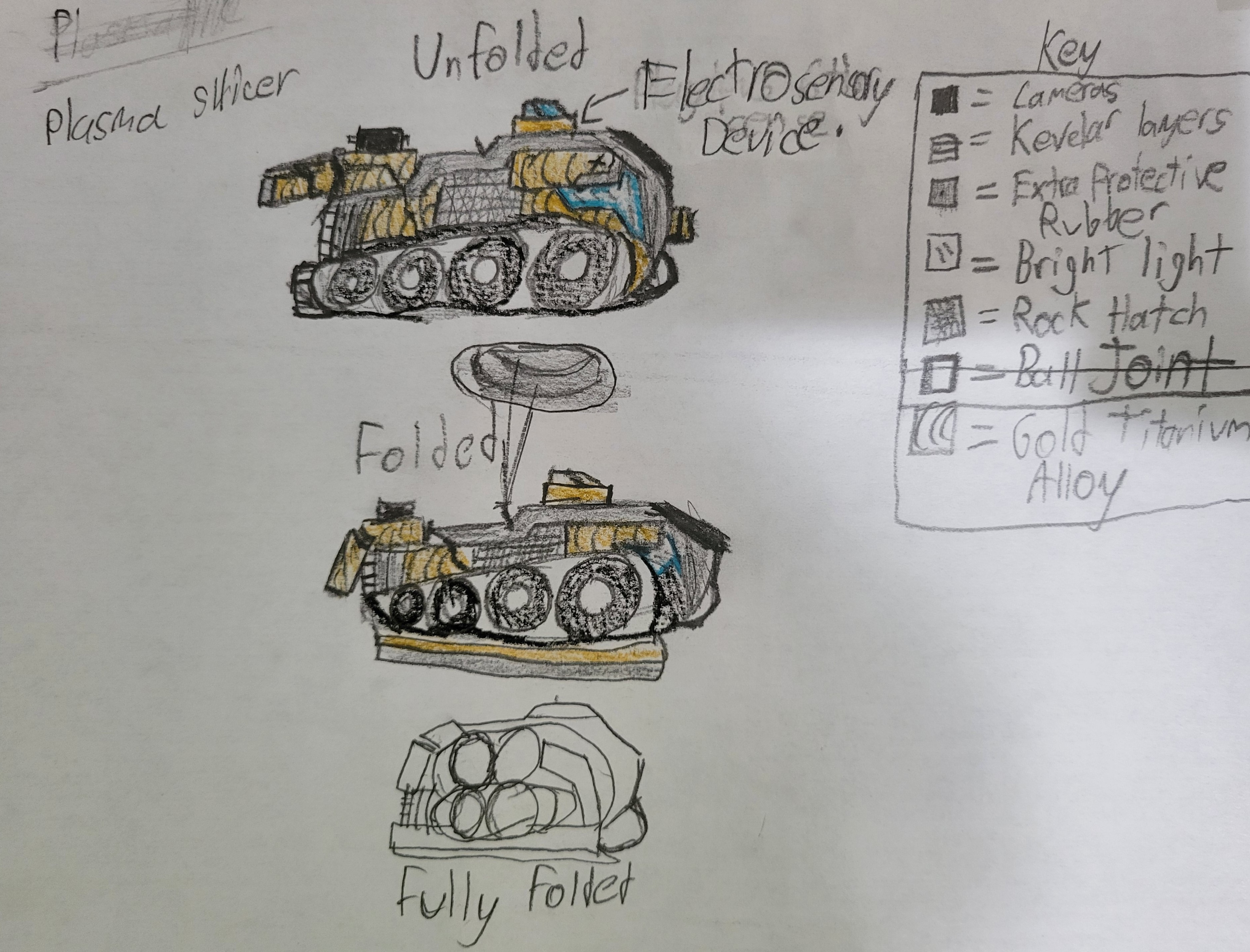
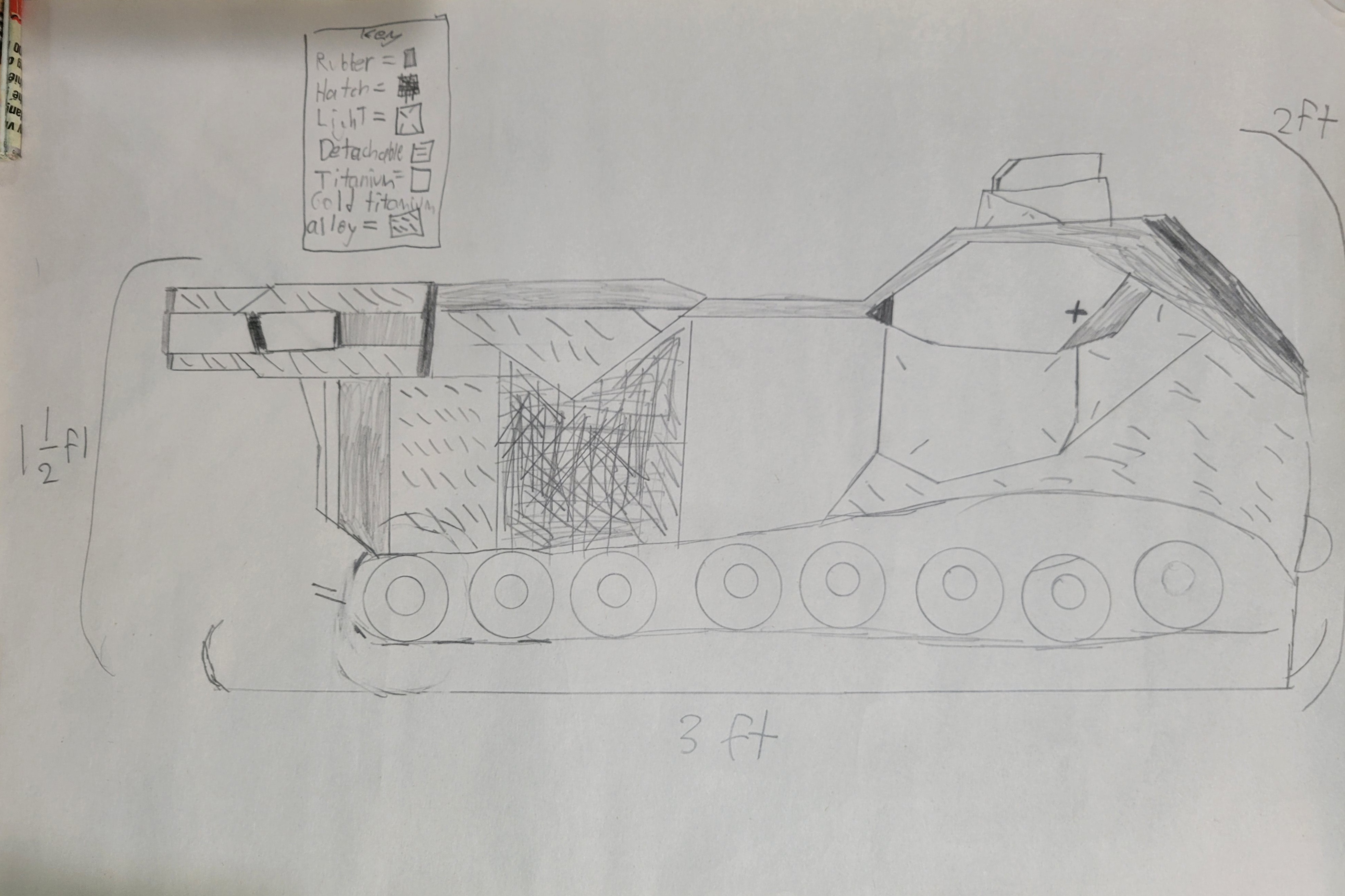
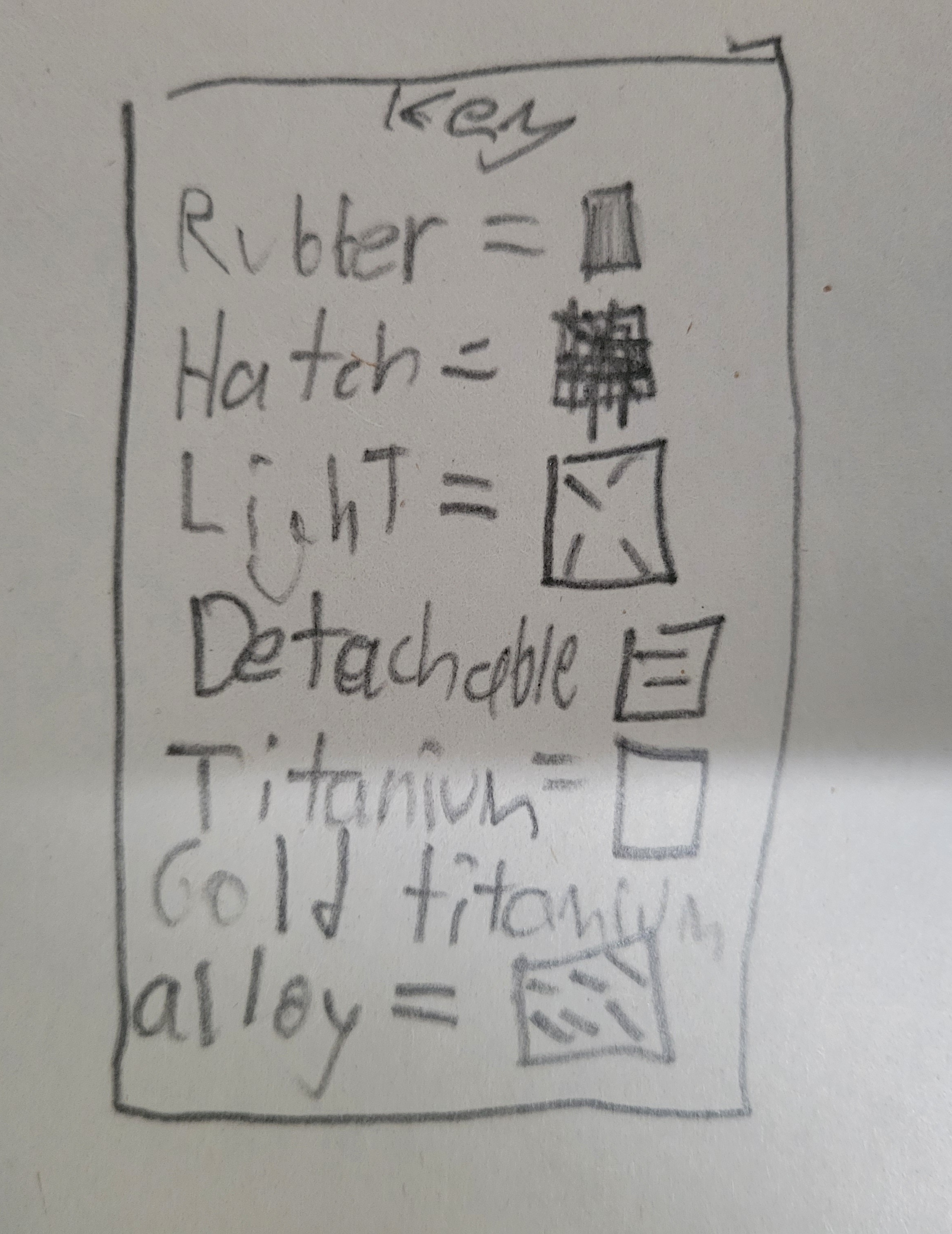
My rover uses a plasma cutter that moves around and aims at the bottom of the rocks. There are 2 cameras on the rover that can detect movement and an electro sensory device, if cameras fail. Has a parachute for landing. Wheels are connected to 6 independent motors. There is a hatch for storing samples, getting more soil in less trips. A ball joint at the bottom helps the rover to turn properly. Has some plates of gold titanium alloy (4 times stronger than regular Titanium). It can also fold up with rubber and Kevlar layers, just in case the parachute fails. It is half sized when it folds up. The robot moves at 10 mph, but if there is an emergency it can go faster, about 15-20 mph, by detaching the plasma cutter. It is battery powered, with 10 batteries for storage and has solar backup power.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org