My first thought was that the robot should be light and have few parts, but I soon realized that designing the robot is very hard.
Operation:
The robot "drives" to the digging site.
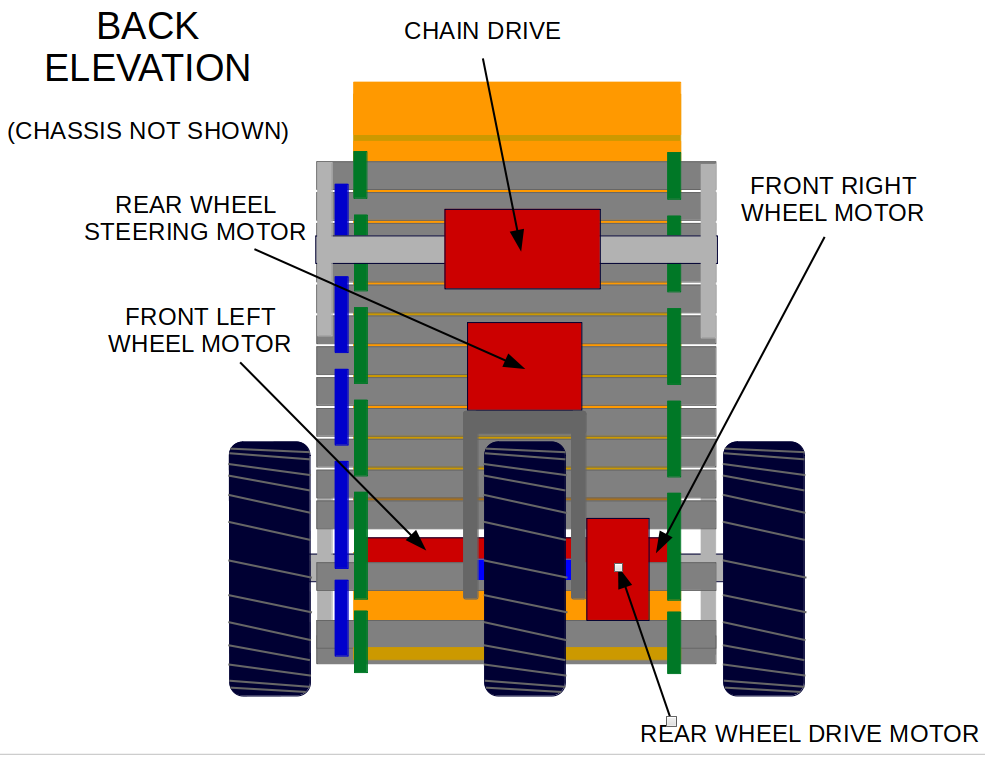
Turning is done by driving the three wheels at different speeds and/or directions.
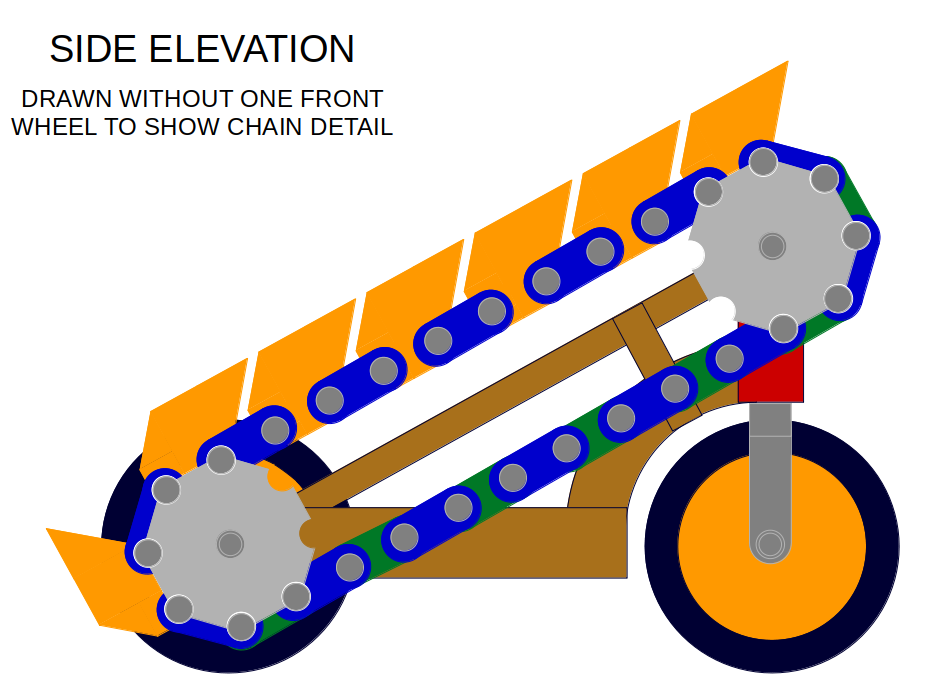
An electric motor drives the top sprocket to move the scoopers, I will call this the "chain drive".
The chain drive runs to allow the scoopers to collect regolith.
Once all seven scoopers have collected the regolith, the robot moves to the dumping site, there the chain drive is once again activated dumping the regolith.
Now it can return to the digging site to start again.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org