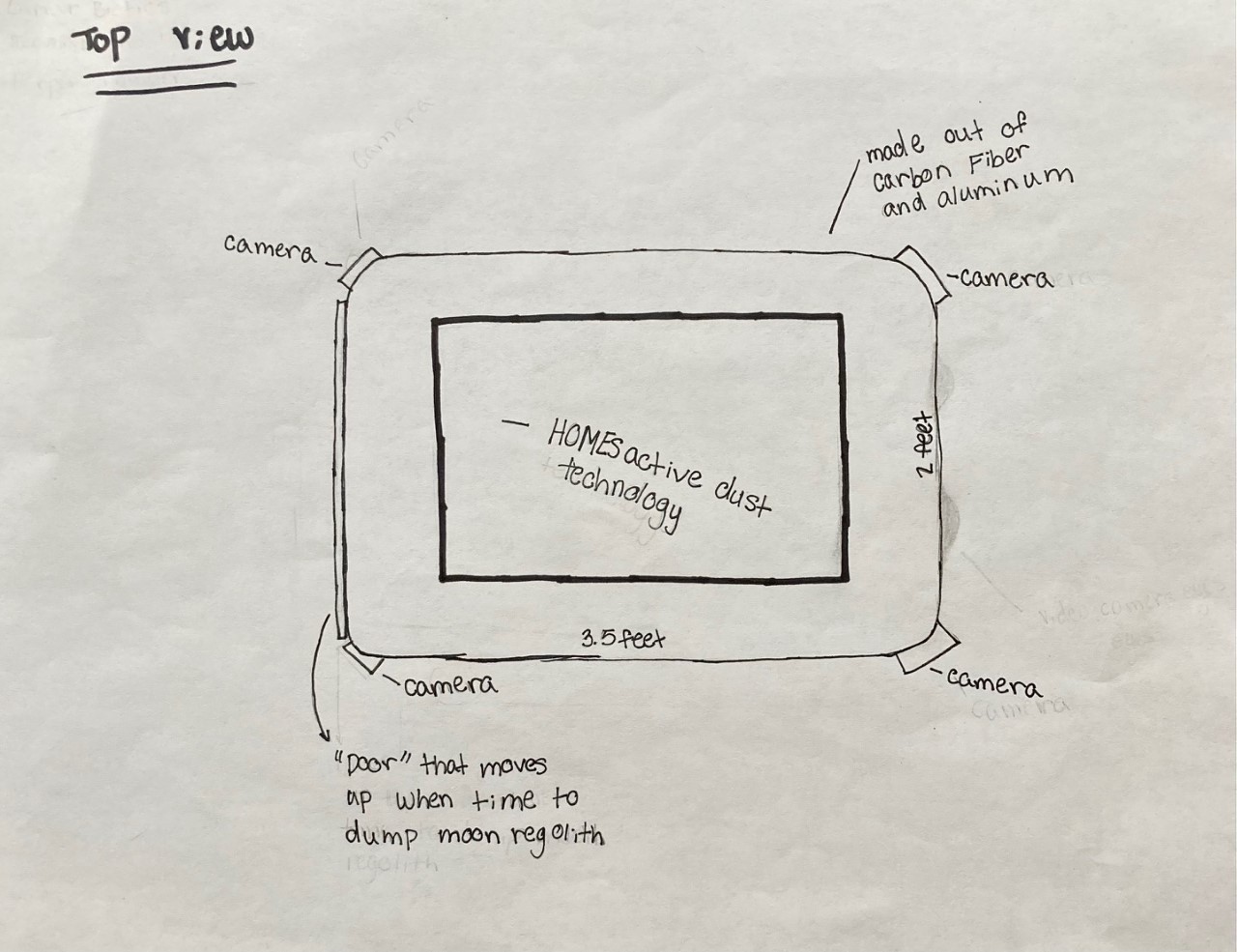
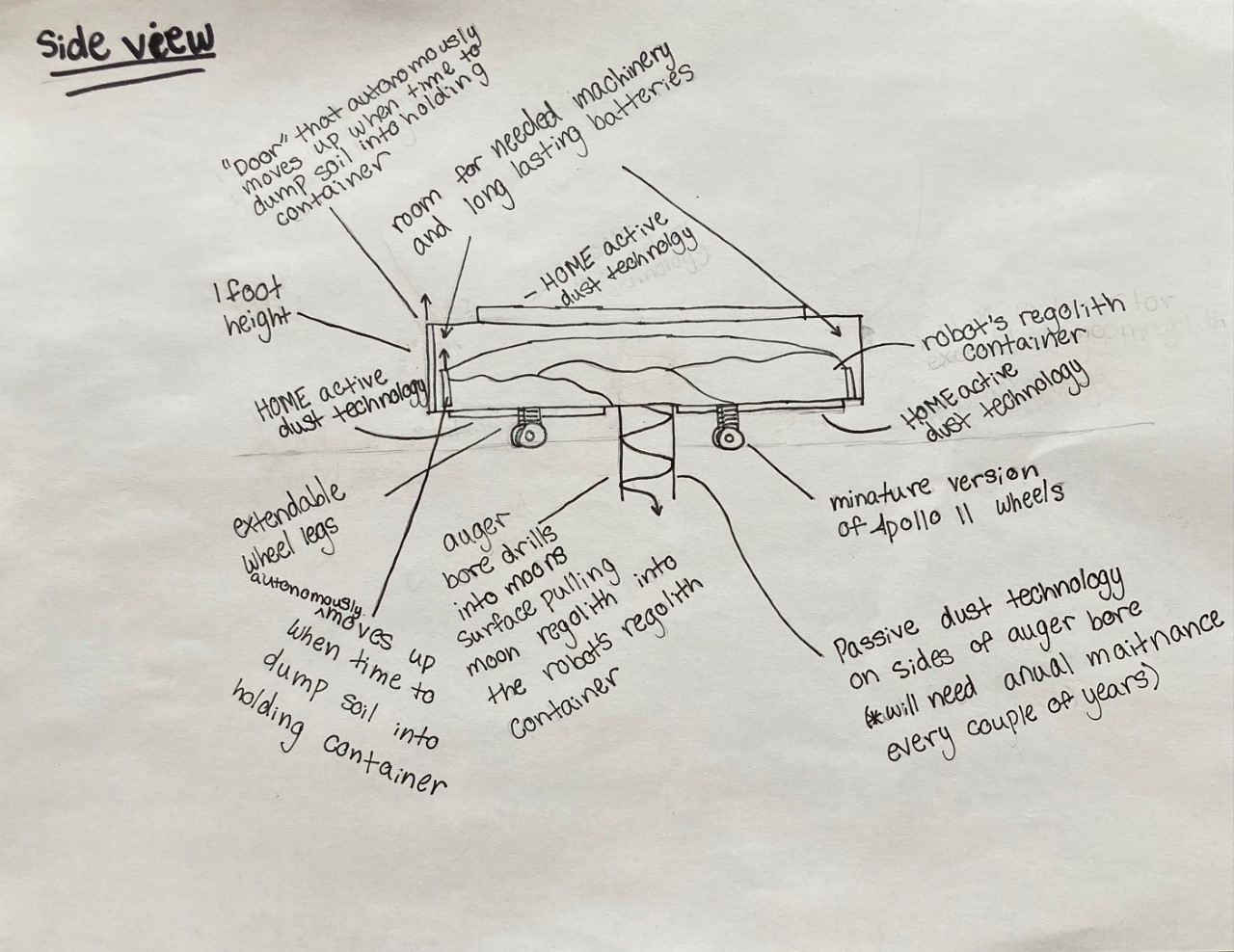
Buttercup is a battery-operated lunar robot and is made of aluminum and carbon-fiber. Buttercup will maintain her center of balance by using extendable legs and maintaining her traction by using miniature versions of the Apollo 11 rover’s wheels. Buttercup uses an auger bore to excavate lunar soil that empties into a transportation container in the bottom leaving room for machinery at the top. She will be able to empty the collected lunar soil by autonomously moving the back closure of the transportation container up and moving the back of the robot’s body up, then the front legs will extend dumping the soil out. Buttercup is controlled when traveling and autonomous when digging and will move at speeds between 2-10 mph. To deal with the dust, buttercup has three HOMES active dust technologies, one main panel at the top and two smaller ones at the bottom.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org