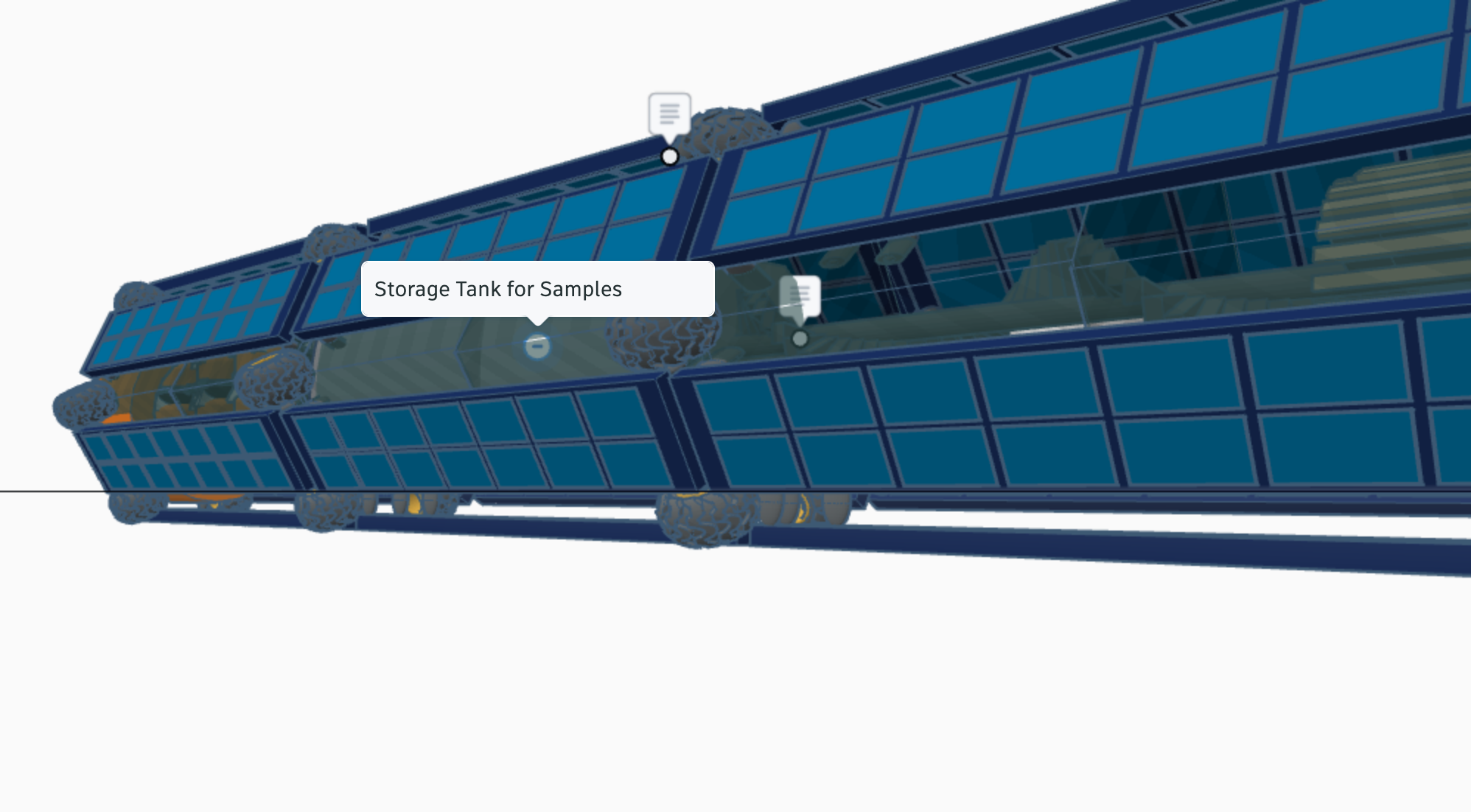

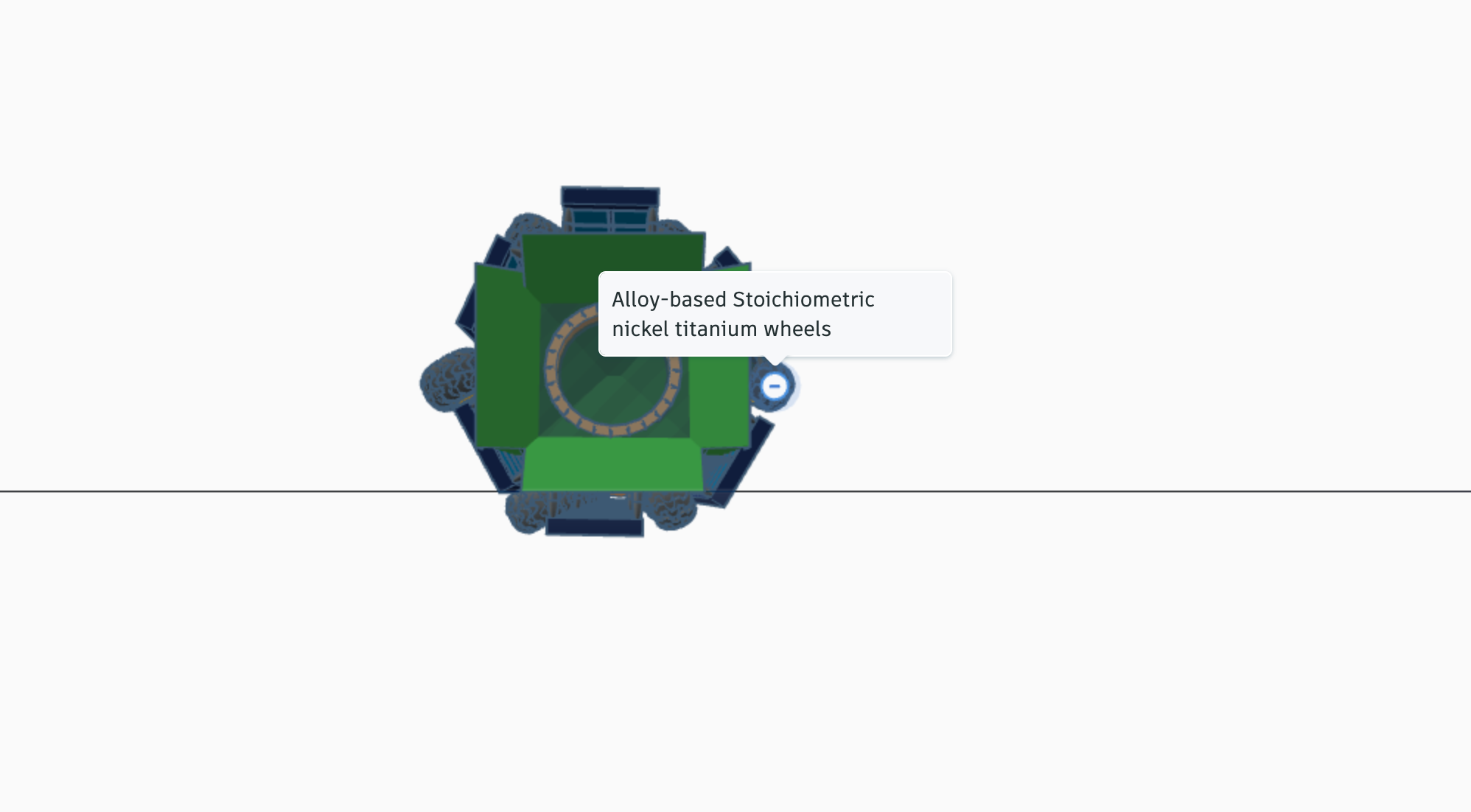
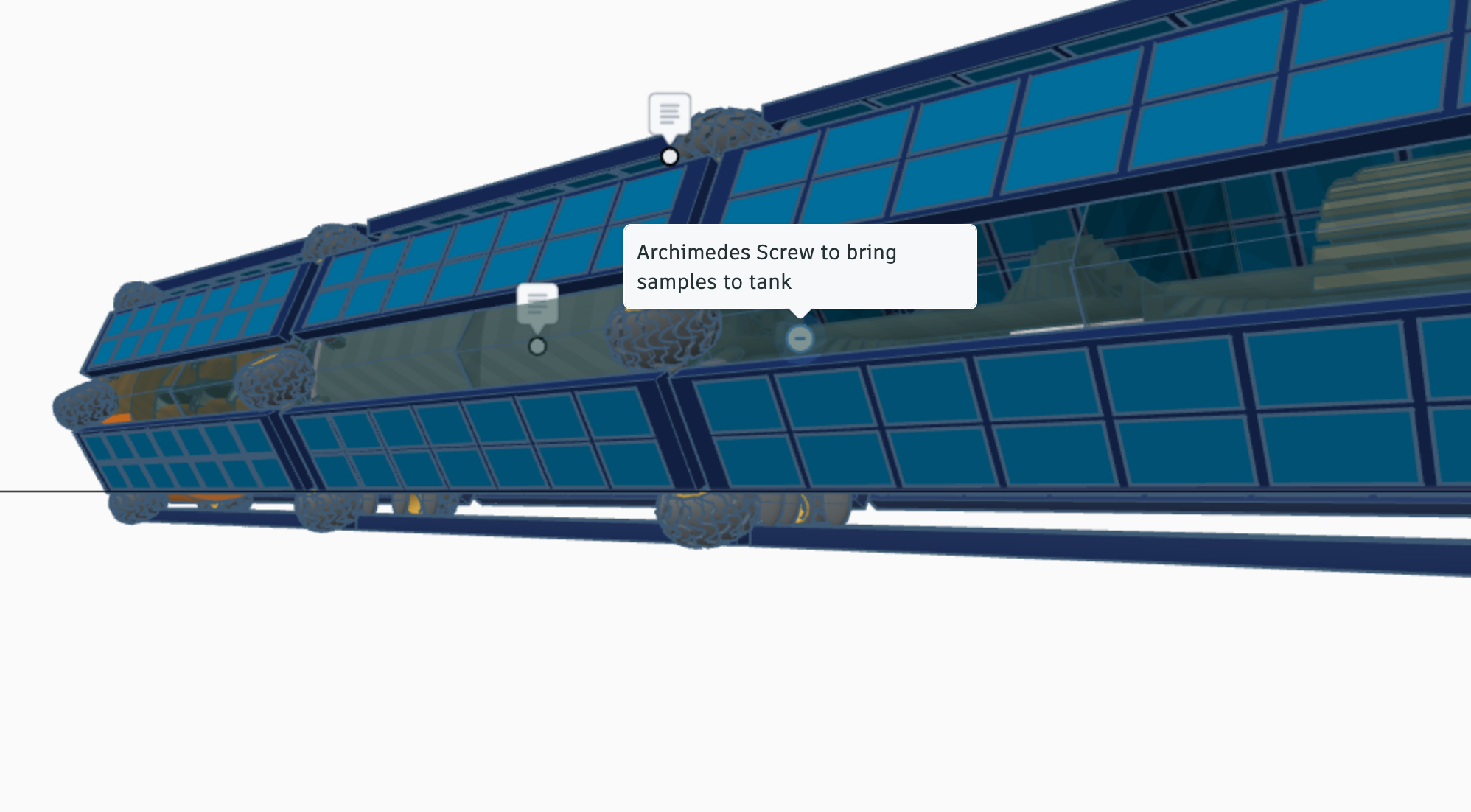
The SerpentoBot uses a slope that allows the regolith to slide into and Archimedes screw, which takes it to a storage tank. This tank has a compressor to pack the regolith into packets. The SerpentoBot transports the regolith to the base in the container, where there is a button to eject the packets through the Archimedes screw. The SerpentoBot will need a lot of smaller trips with lighter loads. The wheels will carry the robot at approximately 10 to 15 mph in the lunar atmosphere. The Archimedes screw is flexible and has joints where the robot itself has, in between the four segments. The robot is built with a material that does not collect electric charges/is electrically charged. One such material/coating could be nano-phased silica or oxide coatings to repel lunar regolith. Then the robot simply tilts itself using a series of joints, and the lunar dust slides out.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org