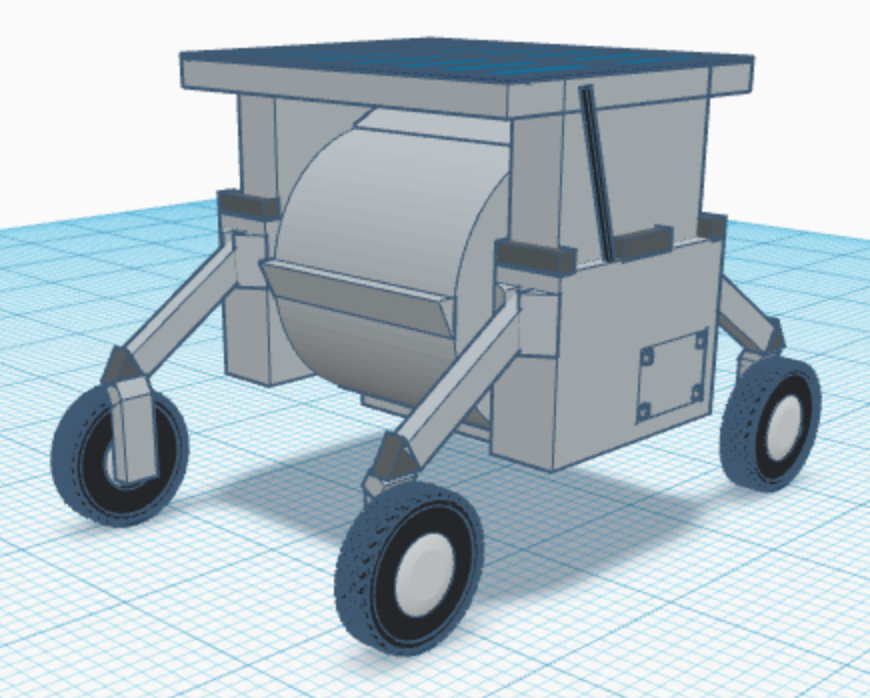
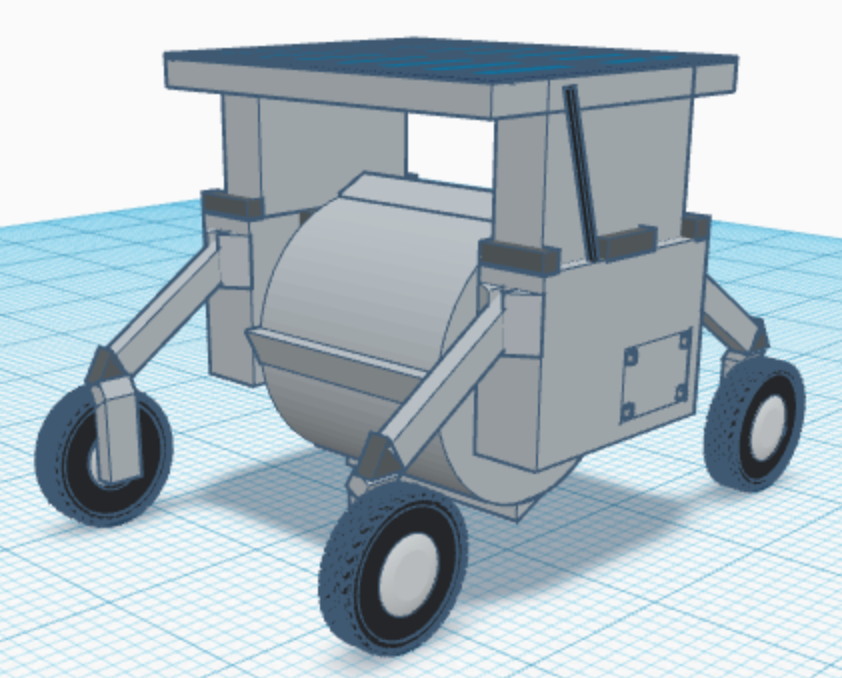
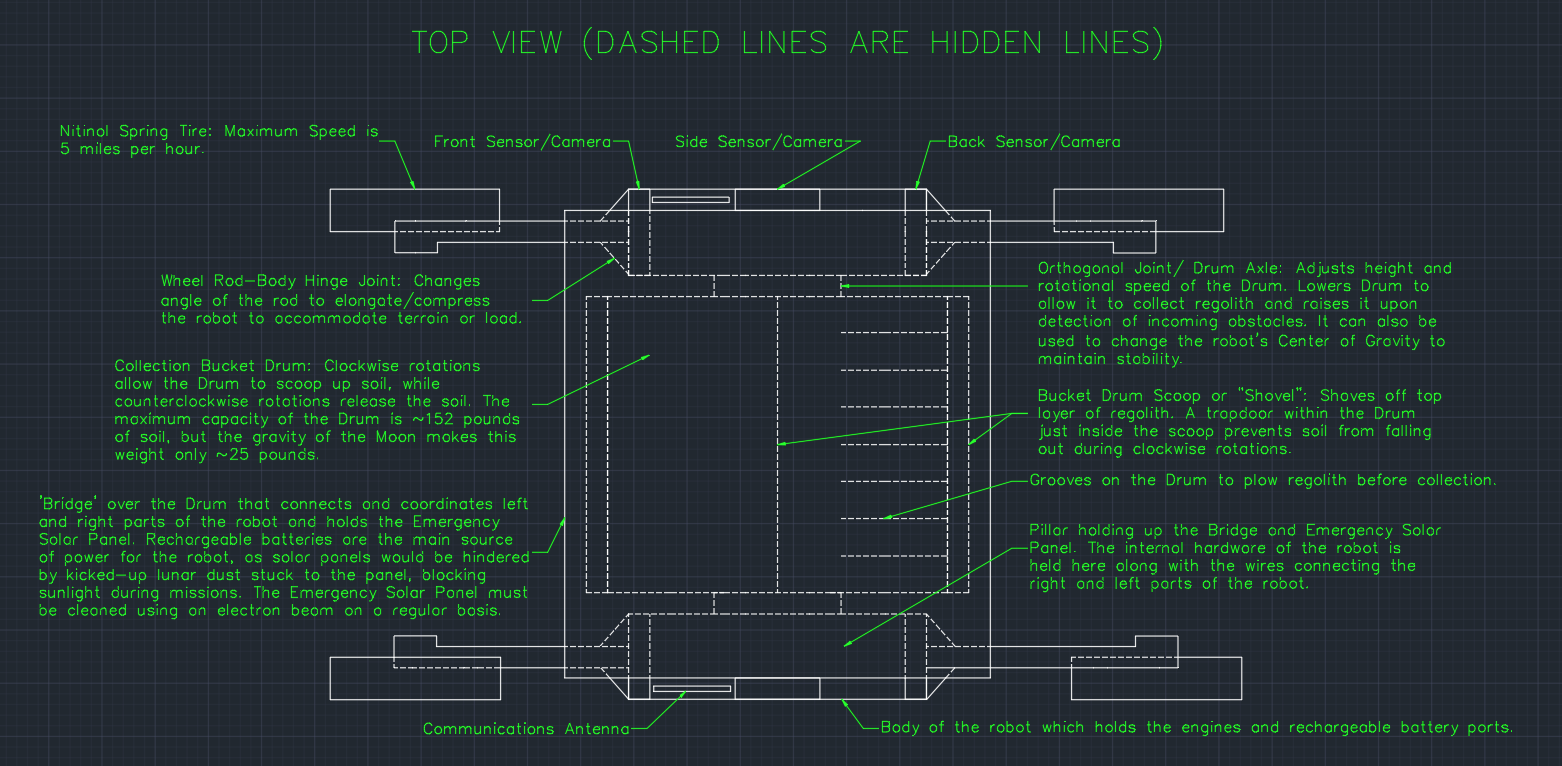
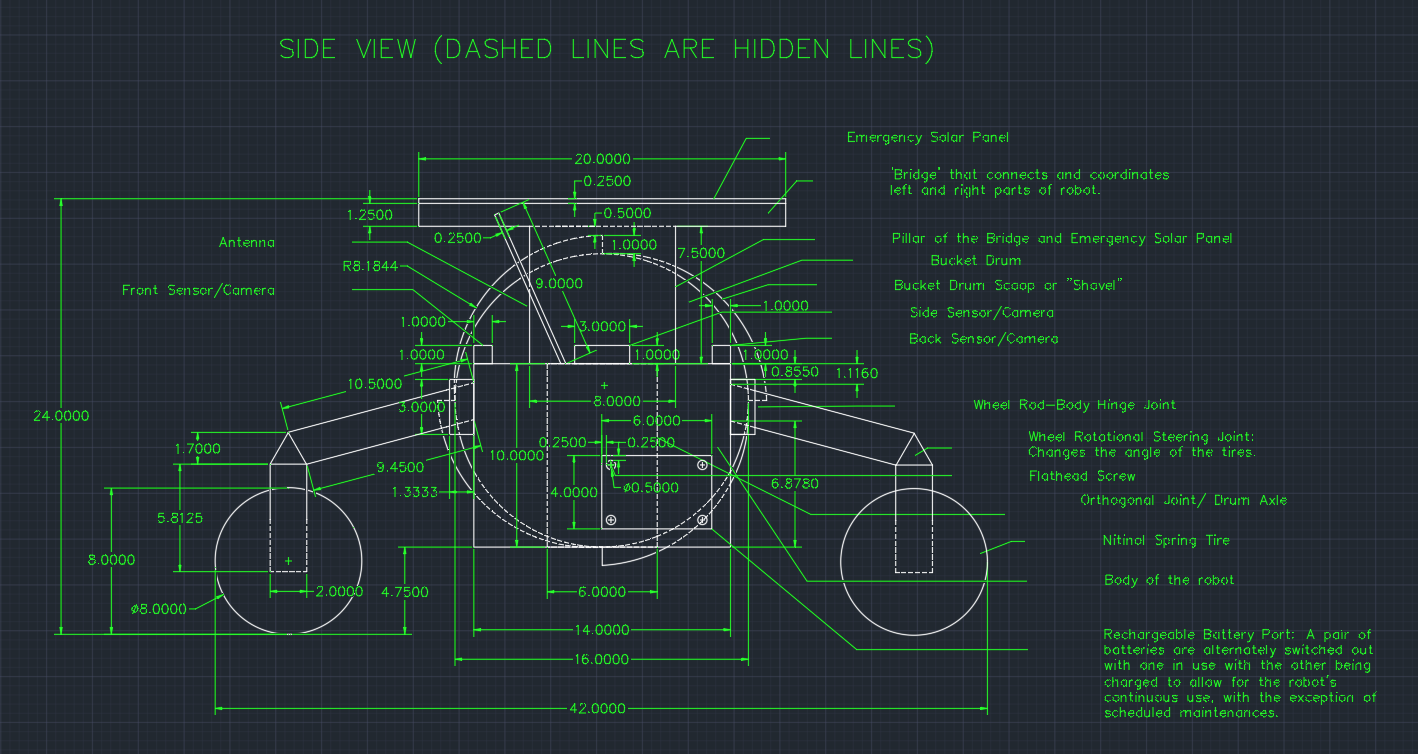
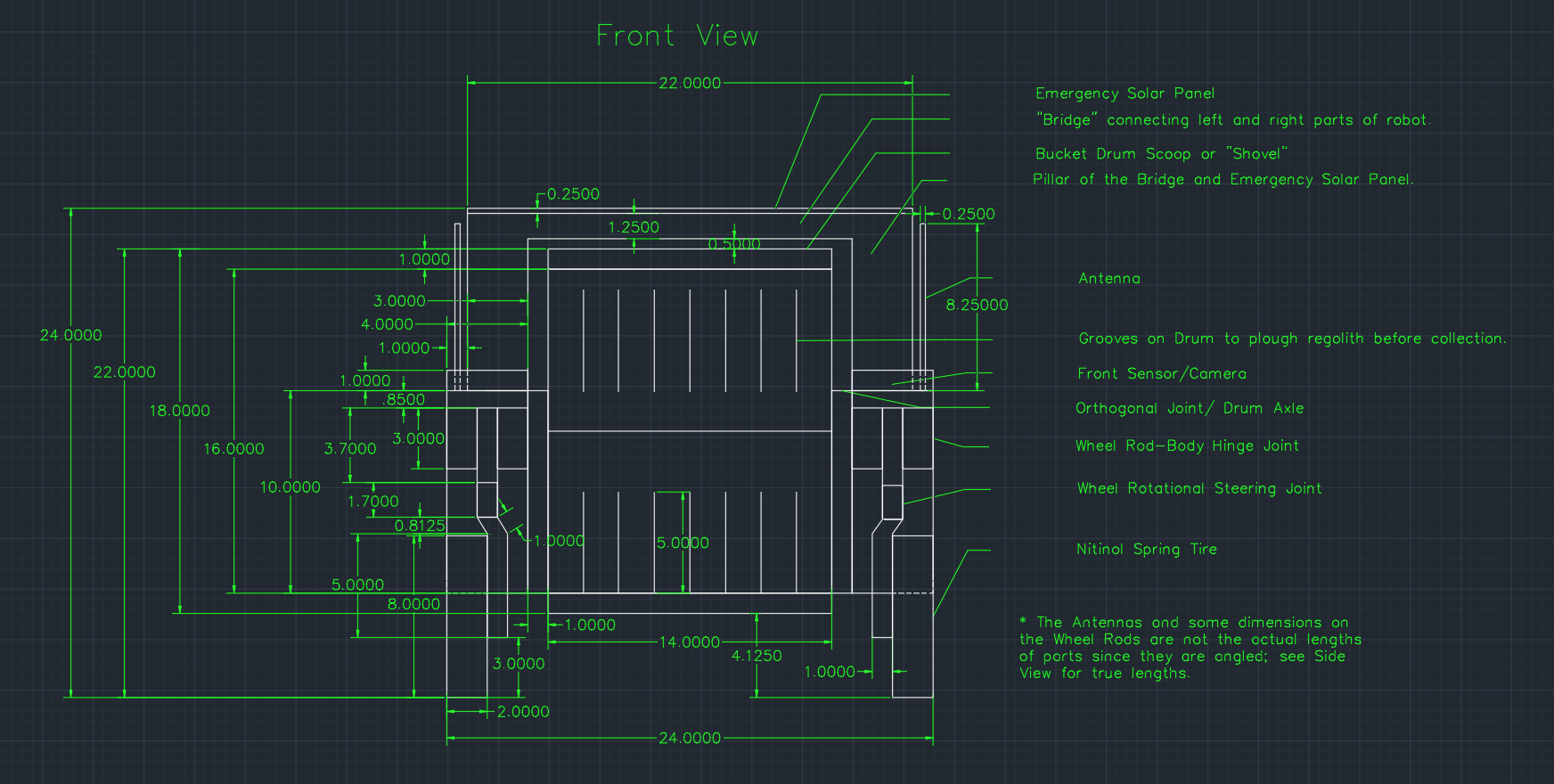
To collect regolith the robot utilizes a spinning bucket drum inspired by RASSOR 2.0, which at maximum holds ~152 pounds of soil, where clockwise rotations scoop up soil and counterclockwise releases material. Applied on the robot using atomic layer deposition, a coat of Indium Tin Oxide dissipates electrical charge buildups generated by sticky lunar dust kicked up by the robot. The wheels are Nitinol Spring Tires which are highly tractive, hold heavy loads, and are proven to proficiently traverse both fine regolith and rocks in simulations of lunar terrain. The robot is autonomous, navigating using lunar maps, sensors, and cameras to identify obstacles and the surface topography. It uses rechargeable batteries with a backup emergency solar panel. The robot is constructed of aluminum alloys capable of handling the -173°C to 127°C temperature range of the lunar surface, and reflects radiation and heat using layers of Mylar space blanket insulation.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org