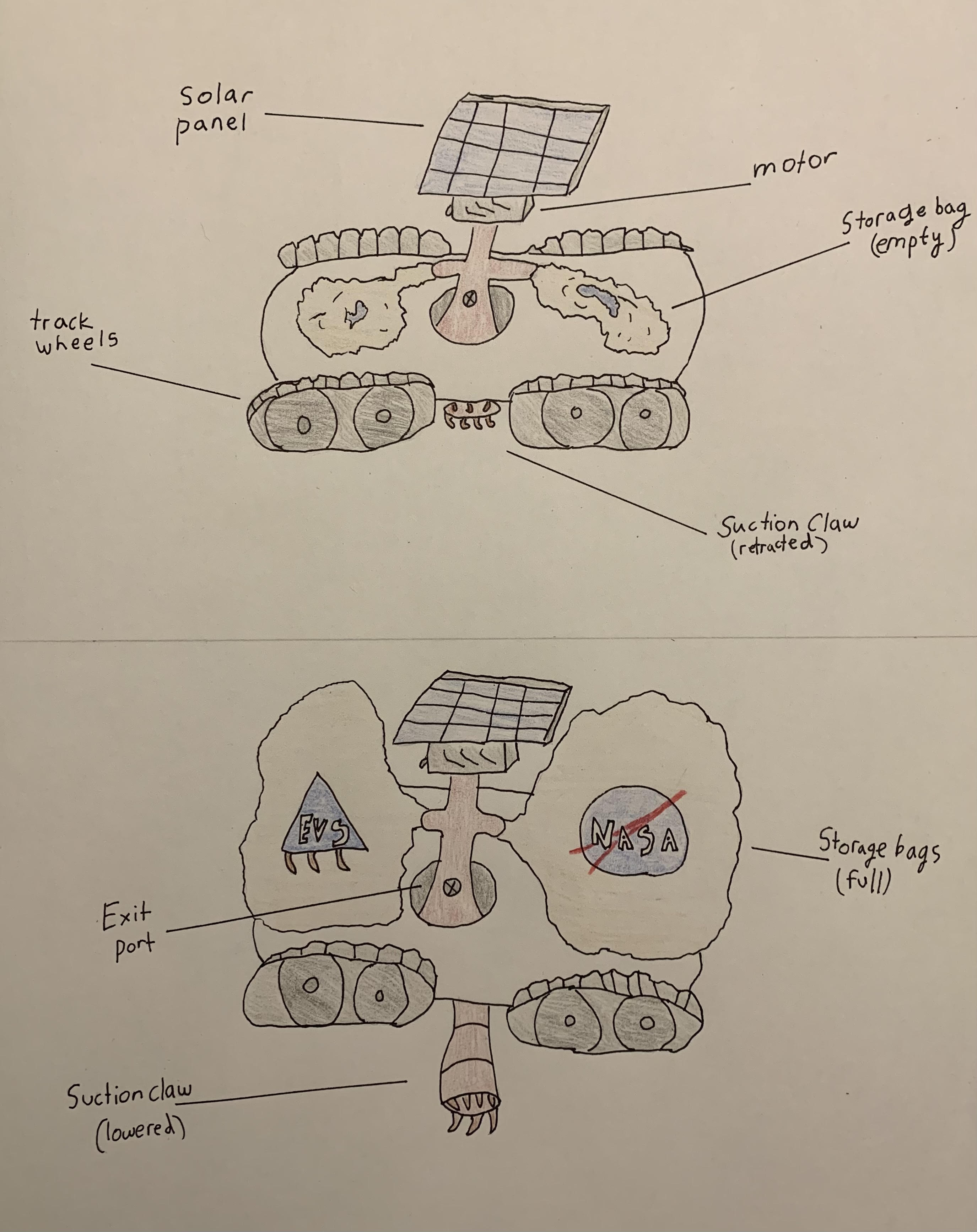
My lunabotics design combines a digging multi-toothed scraper with vacuum suction and expandable storage bags. A solar panel connects to a motor near the top to power the robot’s functions. Underneath the motor is the vacuum unit with the rotating scrapers that can raise and lower when the robot reaches a dig site. Continuous track wheels will provide good traction on any lunar terrain. A platform above the wheels holds the storage bags for collecting regolith. When the bags are empty the robot will be able to move faster and make more trips. When they are full the robot will return to the base and empty the bags through an exit pipe so that water and other materials can be separated from the regolith to make composite concrete. All parts of the robot will be treated with positively charged anti-static coating to repel moon dust.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org