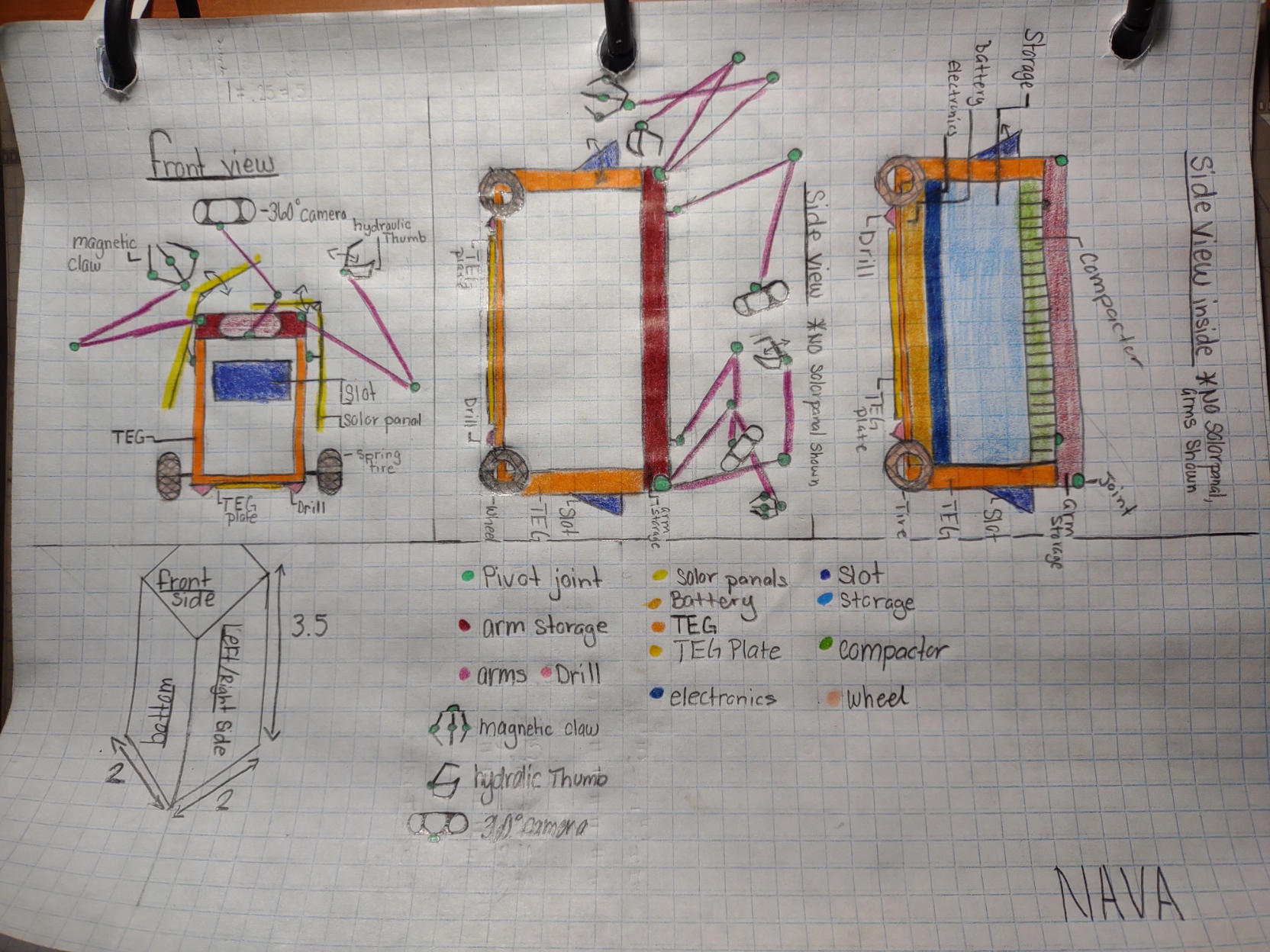
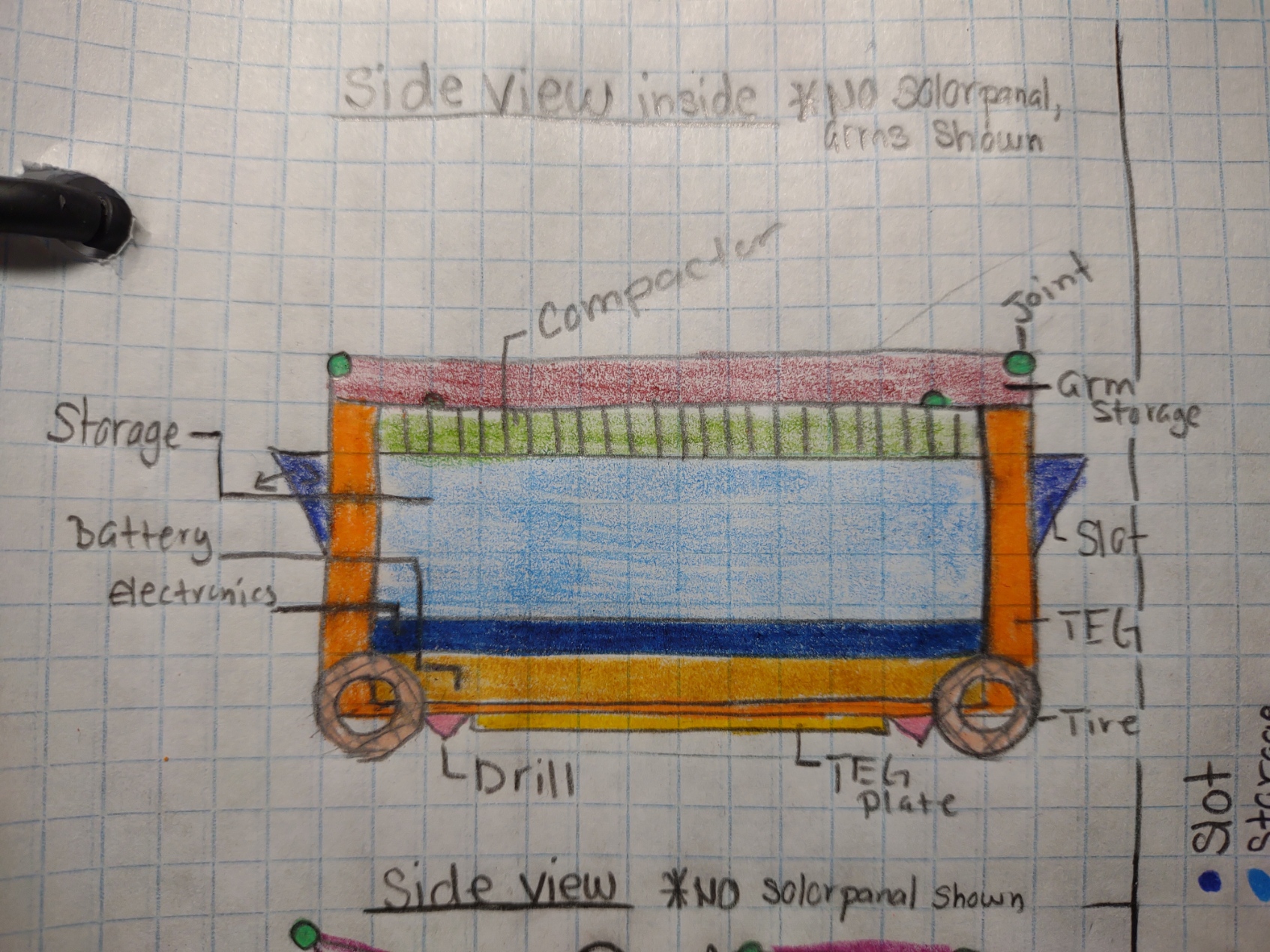
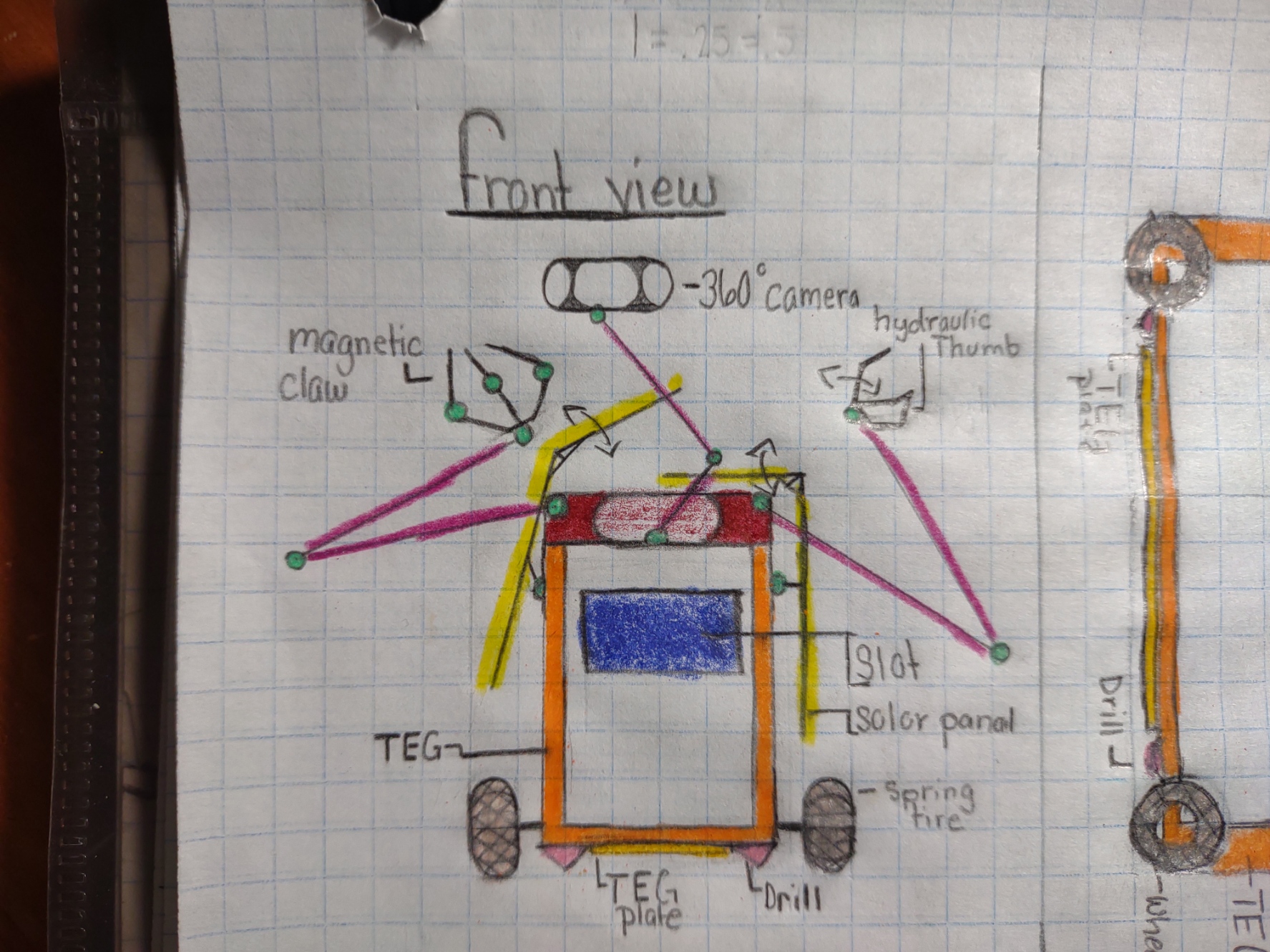
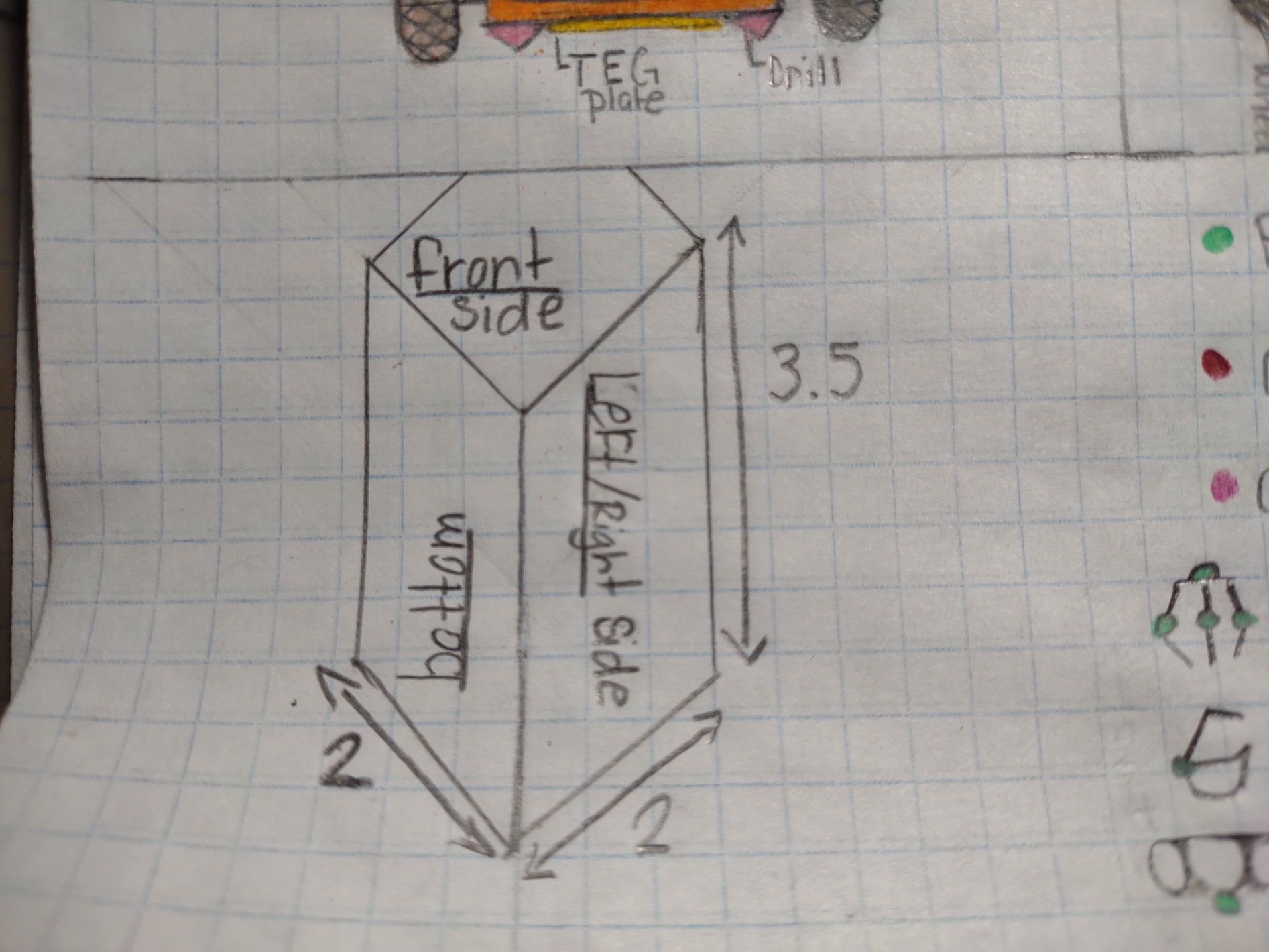
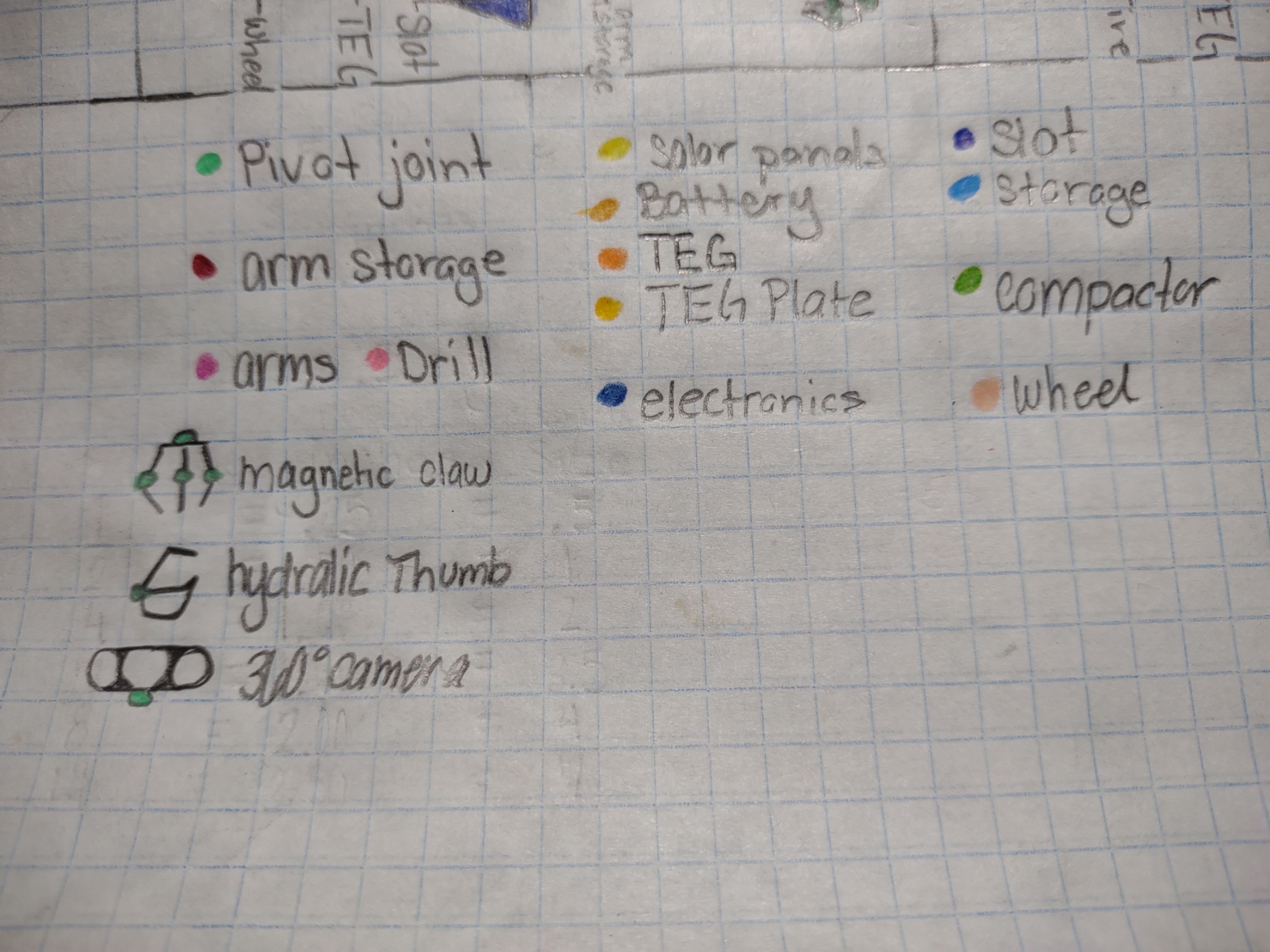
charging-solar panel can cover the top and sides of the robot while traveling it may extend out to act as an umbrella. thermoelectric generators are used to keep the robot from overheating while converting it to energy, a TEG plate can be dropped to heat and later picked up.
Wheels - the wheel will be the airless spring tire
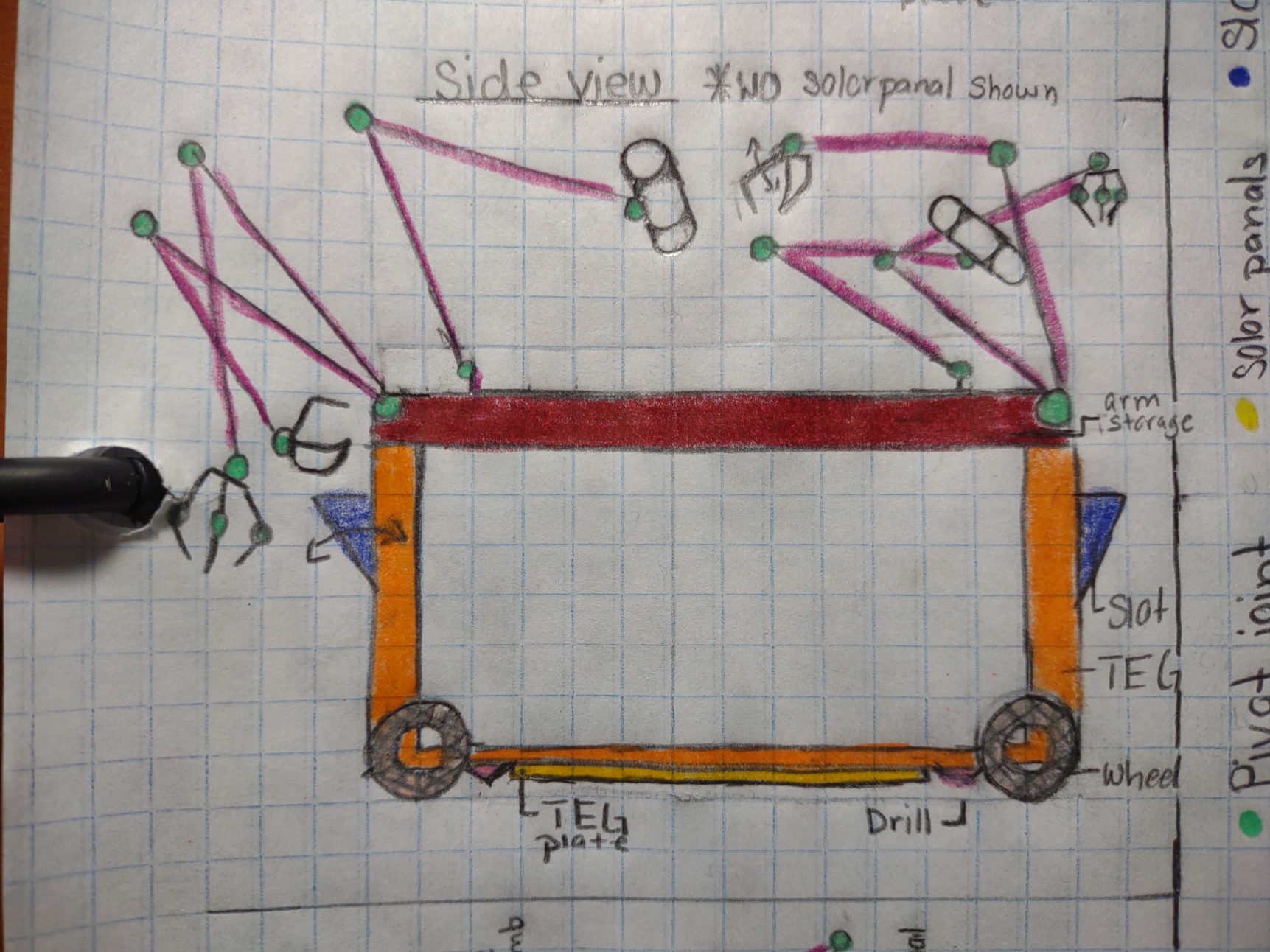
Collection - there are 6 arms with robotic pivot joints, covered by a sleeve, preventing debris from entering the joints(arms are stored on top). At the end of 2 arms is a magnetic claw, the other 2 have a hydraulic thumb. Whatever is collected will be put in a slot going to storage. Finally, drills at the bottom of the rover move the regolith up to storage.
Storage - is a box with compactors
camera- the other 2 arms previously mentioned will have a 360 camera attached at the end
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org