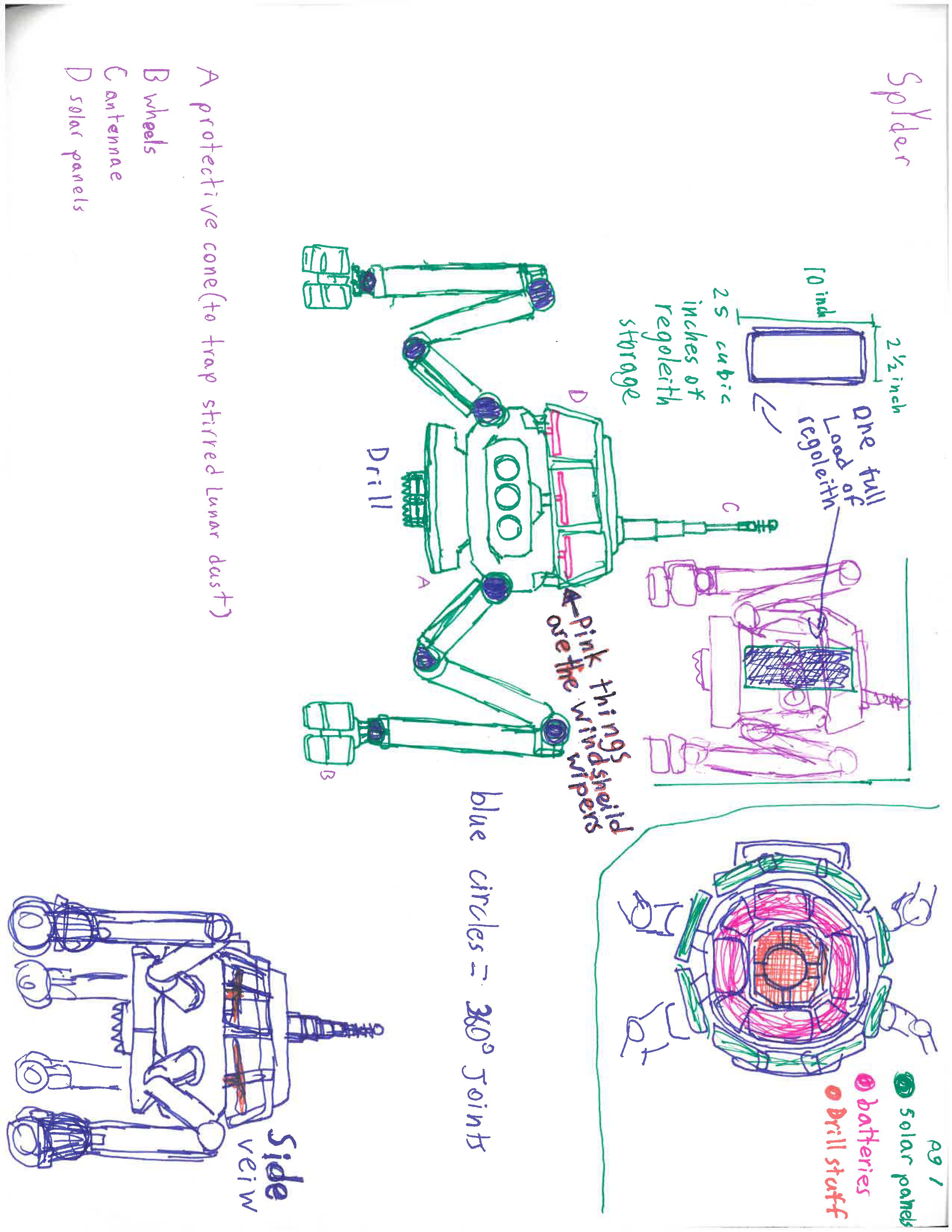
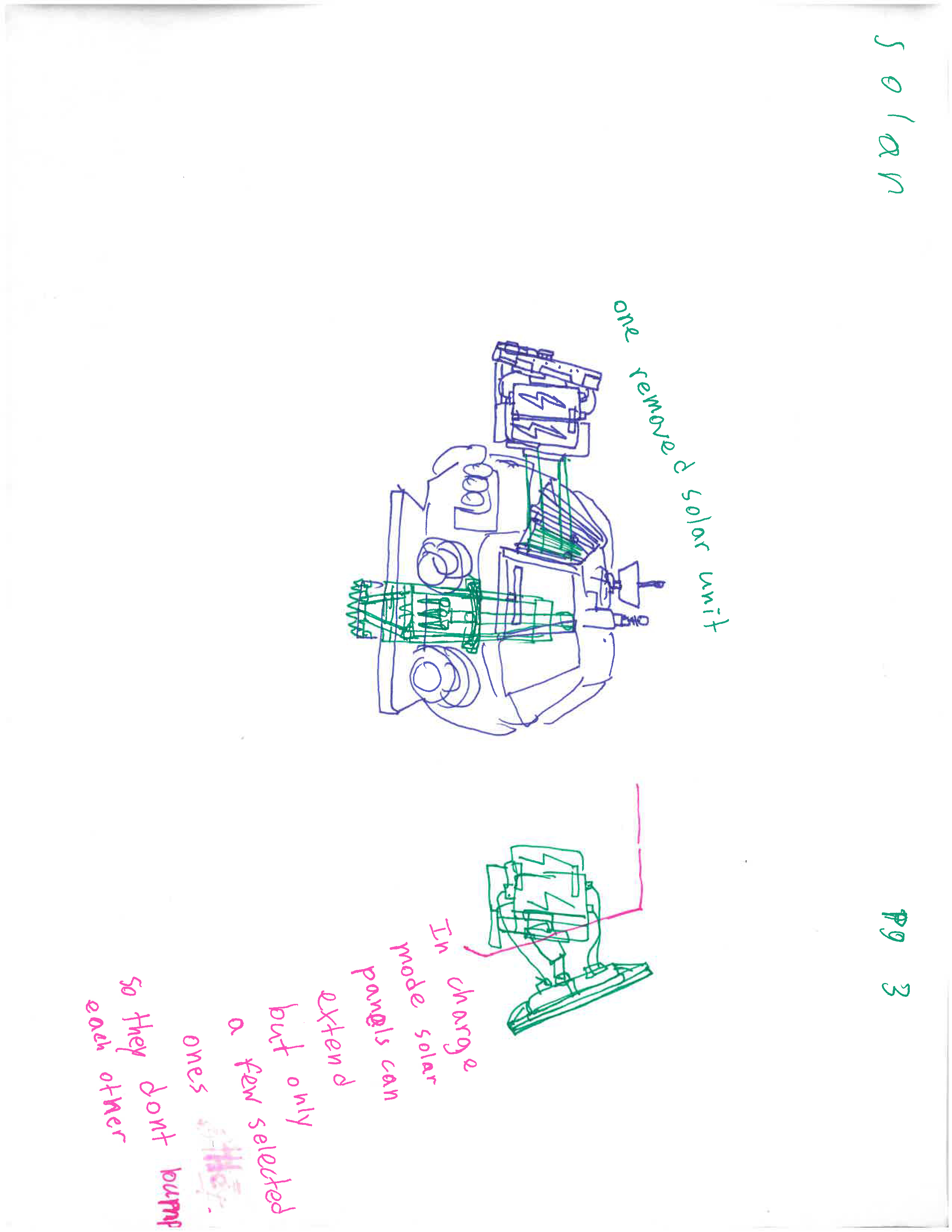
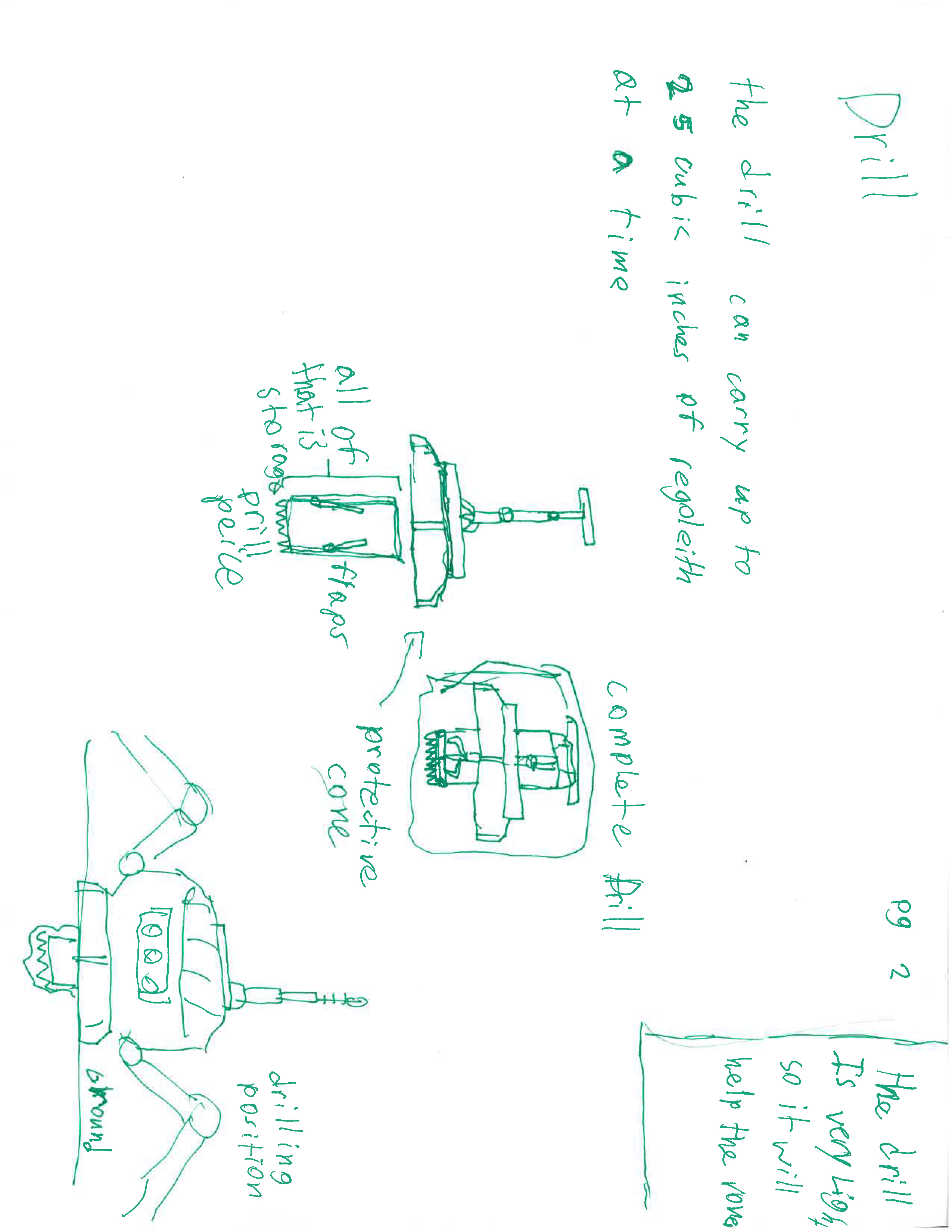
For my lunar rover I have designed a complex rover that is capable of conquering the moon's rough terrain using its four spider-like legs. Each leg has four 360º rotating ball-joints and can fold up for transportation. Each leg needs two at-rw’s, aka all terrain rover wheels. The rover has a cone shielded drill for blocking stirred up lunar dust. The drill can hold up to 25 cubic inches of regolith. See anatomy for more information. The rover has a long range retractable antenna for communication. To power the SpYder rover I incorporated 10 solar panels (3 on front and back and 2 trapezoid shaped ones on the left and right sides). Each panel also has a solar windshield wiper so it can remove lunar dust. The windshield wipers will trigger when the solar is making a low amount of power.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org