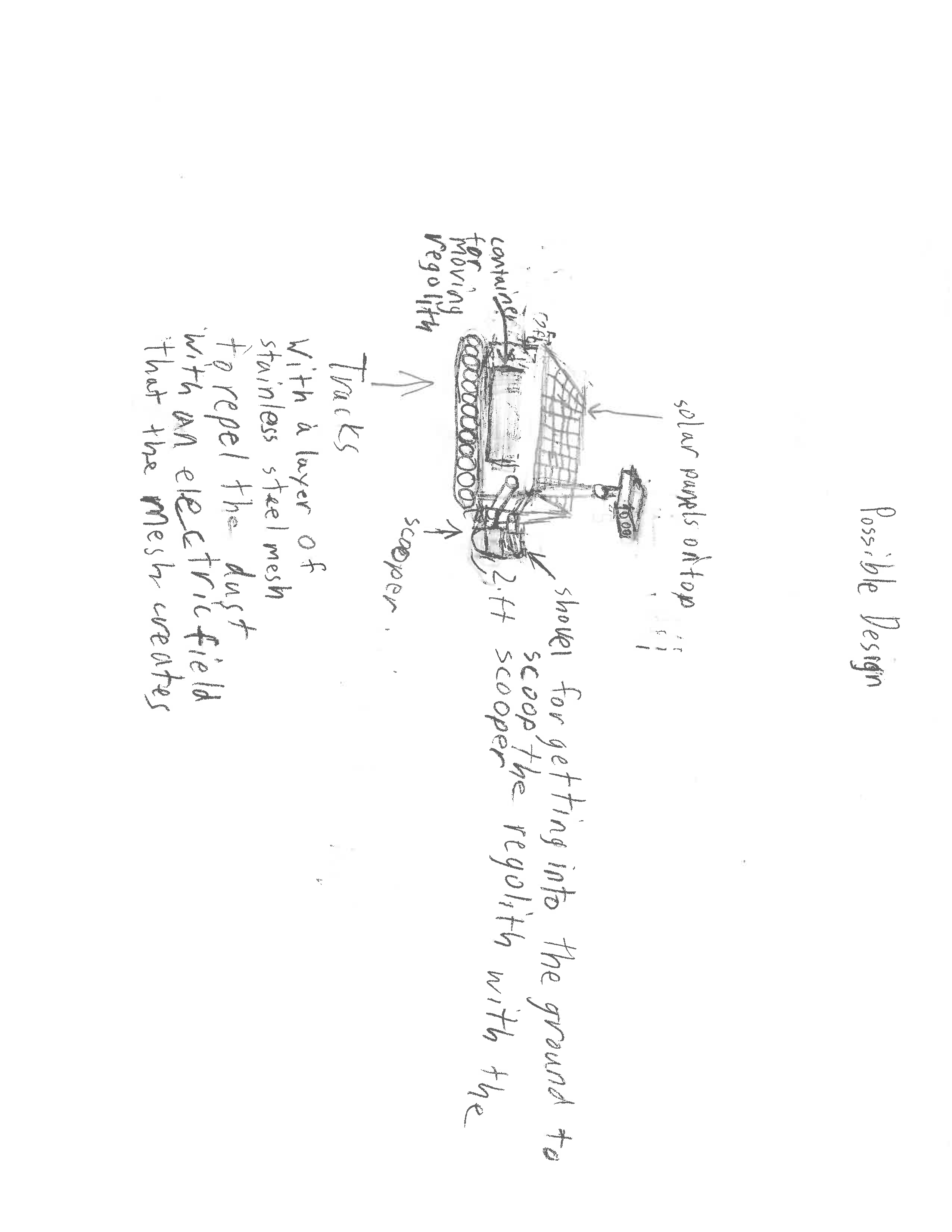
My robot’s name is ARMR which stands for Automatic Regolith Mining Robot. The purpose of my robot is for it to go to the moon and mine lunar soil or regolith. My robot will be 3½ x 2 x 2 ft. It will have one arm with a shovel for a hand and the other arm will have a scooper for a hand. My robot will dig the regolith with the shovel hand.
The ARMR will scoop regolith with the scooper hand. The ARMR will move regolith with a container that is 3 x 2 x 2 feet, it will carry larger loads and make less trips. The ARMR will have solar panels pretty much all over it in order to collect sunlight for power. It will be automatic as it is stated in its name. In conclusion, my robot will be able to dig, scoop, and move lunar soil.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org