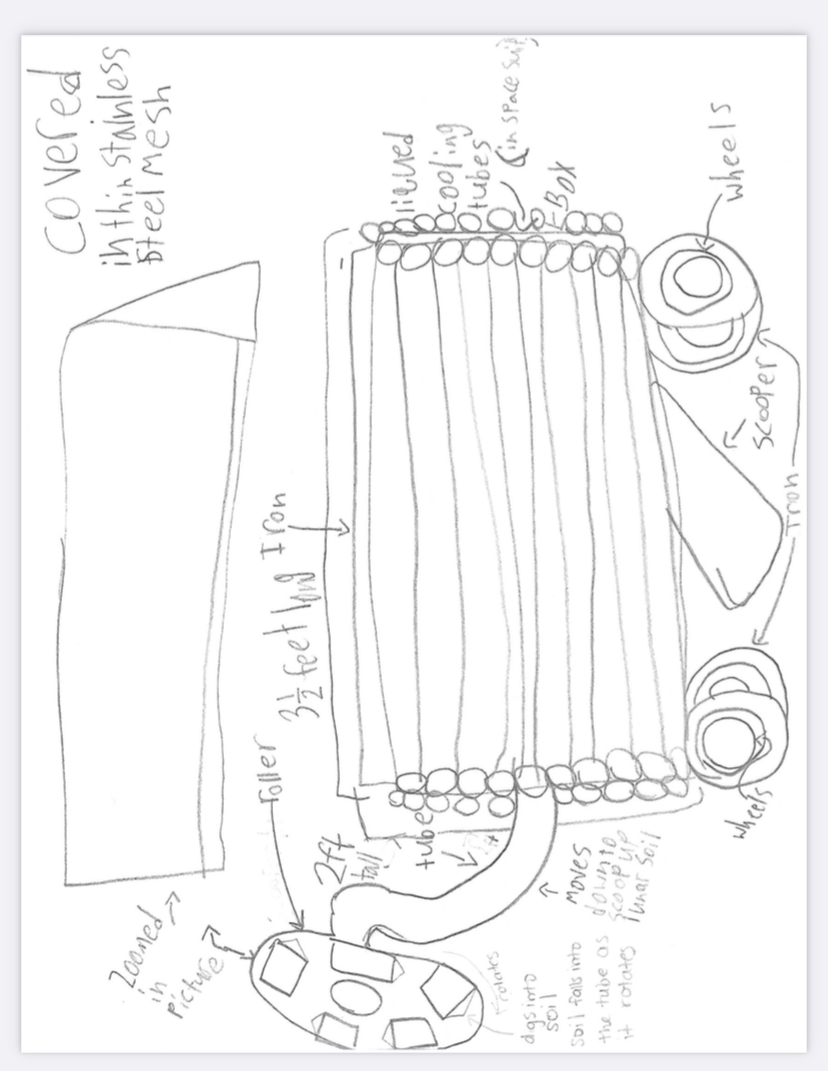
Operational Design: the scooper on the bottom and the roller will scoop up lunar soil as it rotates perpendicular to the soil in a clockwise rotation. It will scoop as it rotates and drop down the tube.
It will carry a lot of soil because the main part of my robot has a box inside that the soil is dropped into. Once it is full it will travel to the landing site and drop the soil by opening a hatch on the bottom.
It will be covered in stainless steel mesh to prevent lunar dust from sticking to the robot. The mesh’s magnetic field will repel the dust based on Professor Larry Taylor’s research.
There are cooling tubes inside and on top of the iron is the stain steel mesh and the wheels will also be covered in stainless steel mesh.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org