
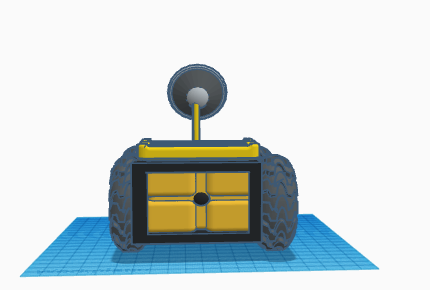
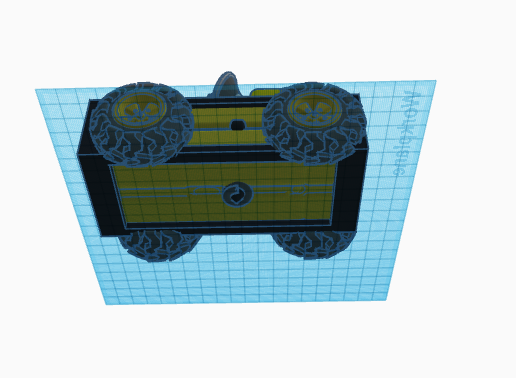

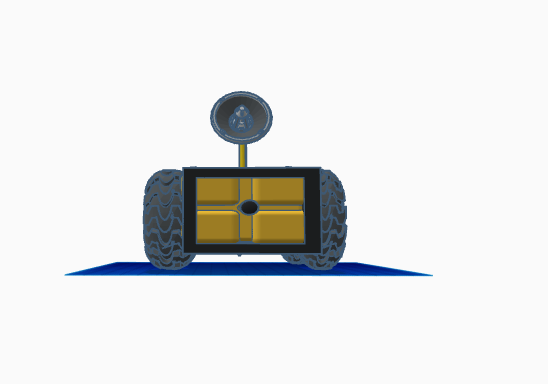
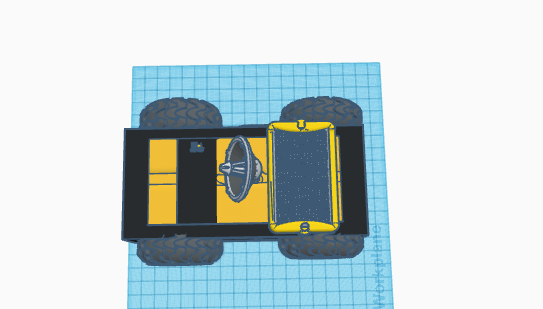
I designed a robot for an out of this world job. My robot Jarv can drill and collect lunar soil by flowing the soil up the drill into the robot. When the robot is done drilling, the drill retracts back into the robot. Then the soil goes into the robot, through a conveyer belt that separates the soil between four containers to balance it. Since the regolith weight is balanced, the robot could hold lots of it reducing the number of trips. When the robot reaches base, the back door opens, letting the soil out of the robot. On the robot’s top there is a moon duster that shoots beams of electrons so if any lunar soil sticks on the robot, it shoots it off. There are removable covers and when there is too much dust sticking, the covers fall off and the dust goes with it.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org