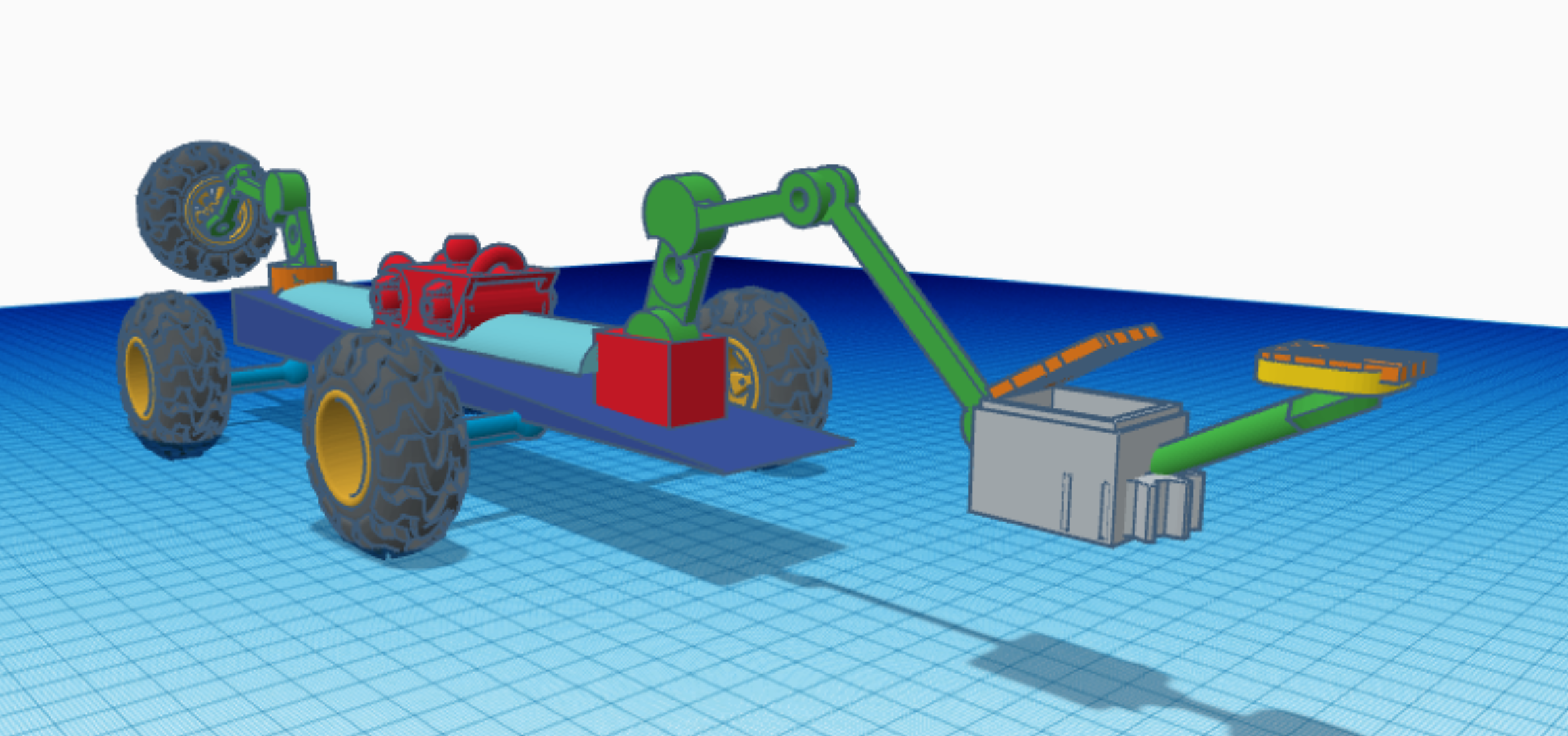
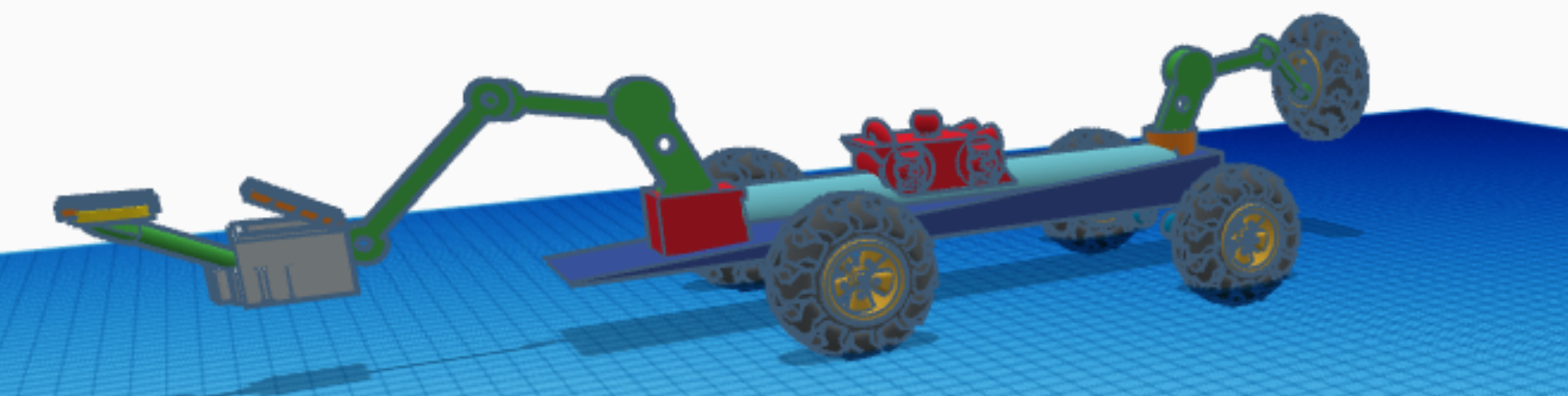
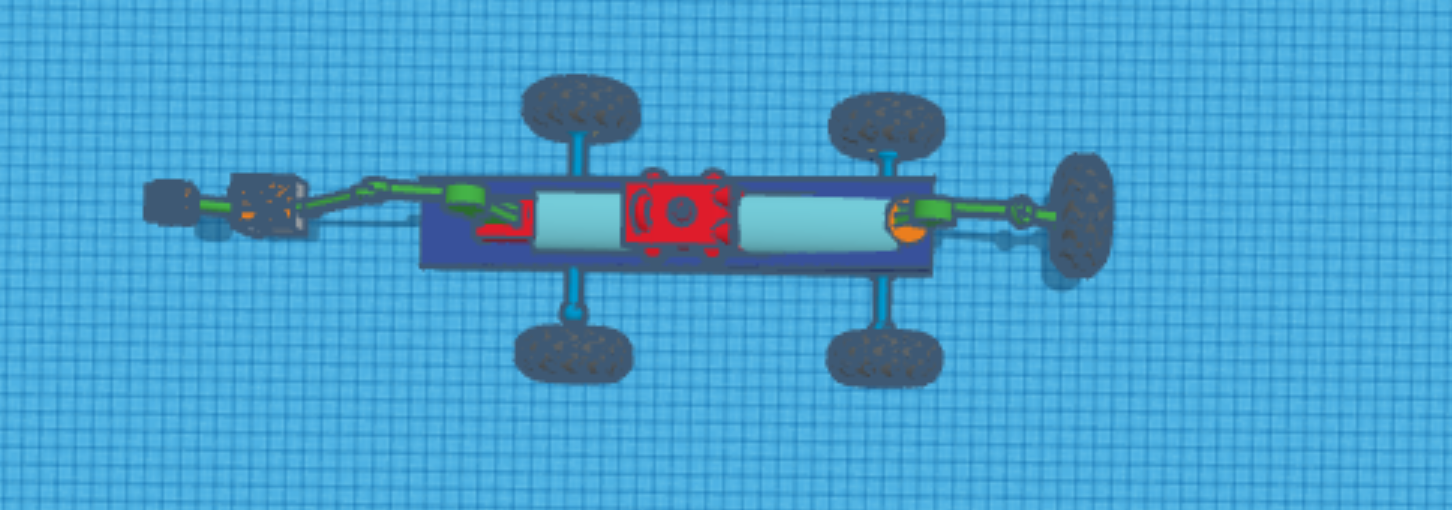
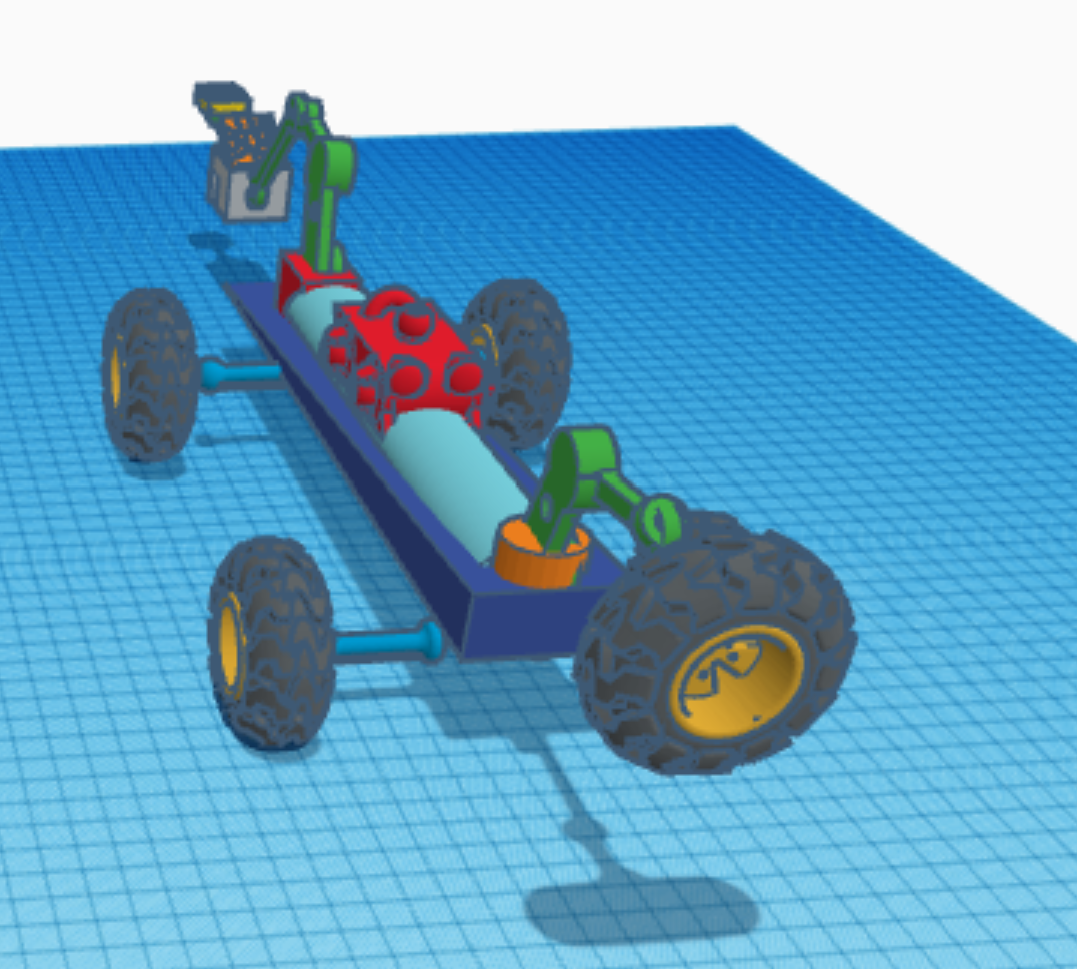
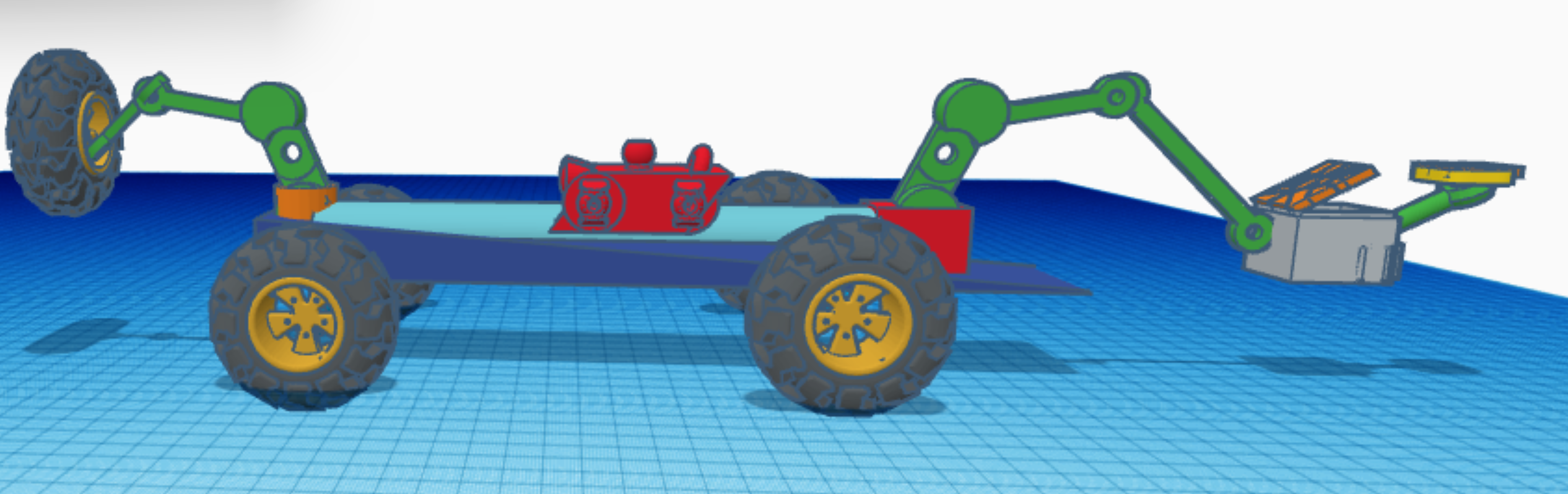
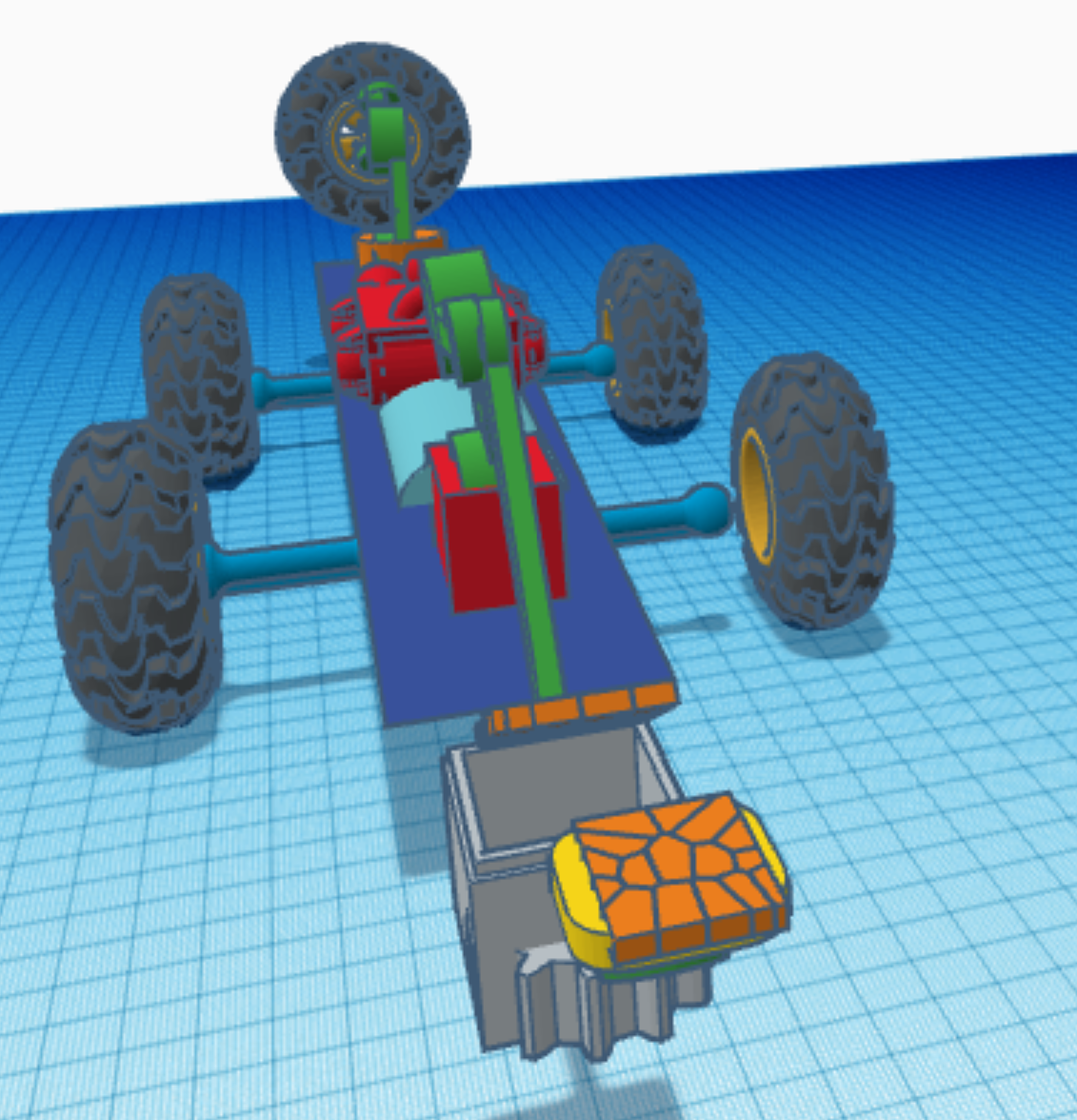
The robot that I have created contains features that may help it pick up lunar soil. To pick up the soil, the front of the robot has a rotating arm that can move up, down, and side to side. Connected to this is a spike just in case the terrain is hard to get through. On the back of the robot, it has an arm with a backup wheel and tire, just in case something goes wrong. Where the soil is stored is an emergency setting where the box containing the soil can eject from the robot. This tires on the robot contain spikes with a curve facing towards that front of the robot. These features may give this robot a chance of possible collecting soil on the face of the moon.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org