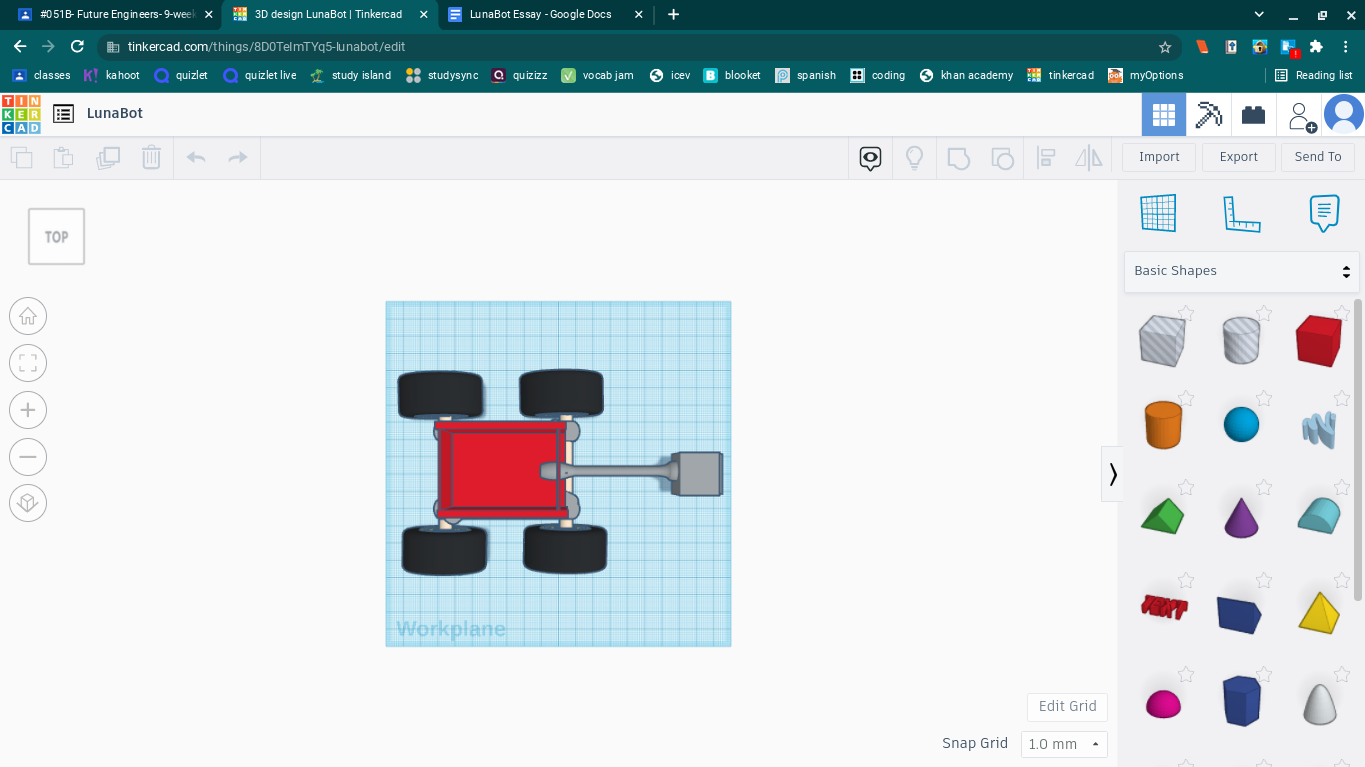
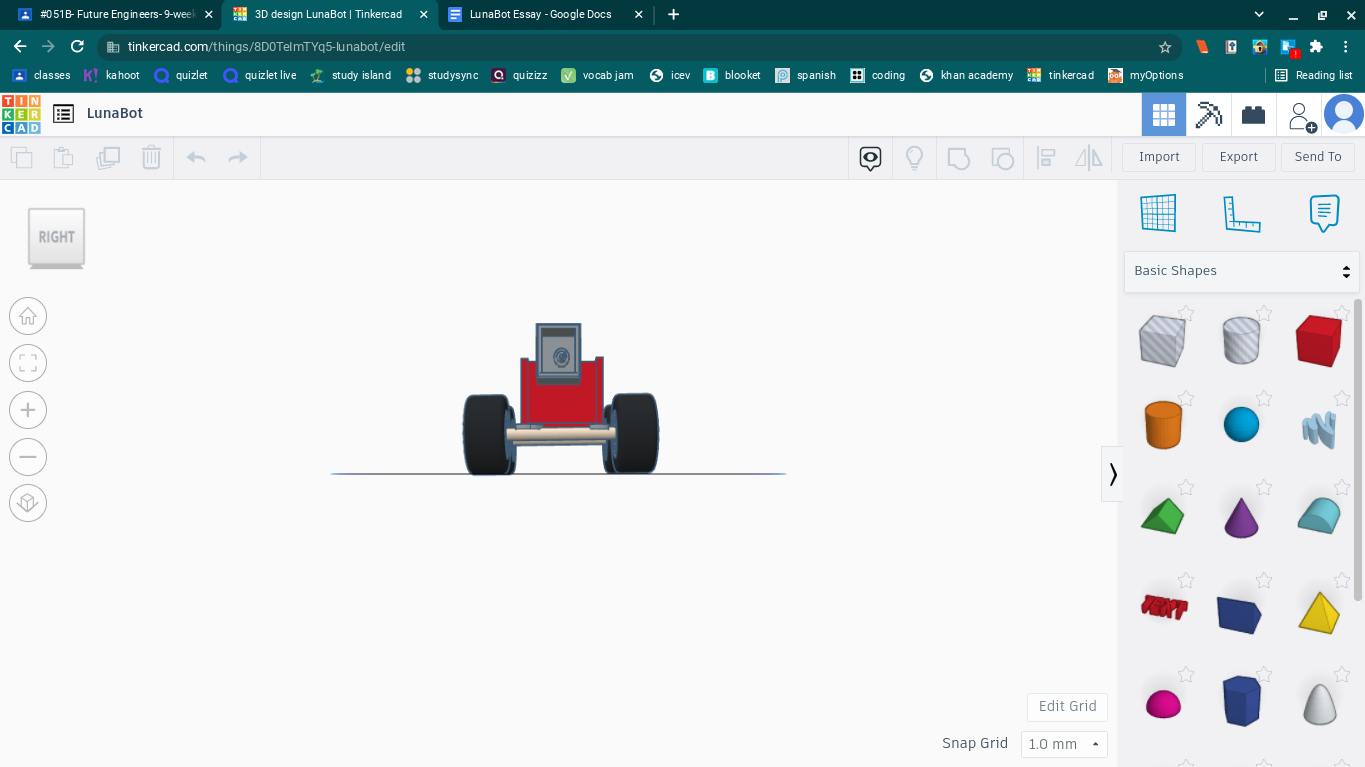
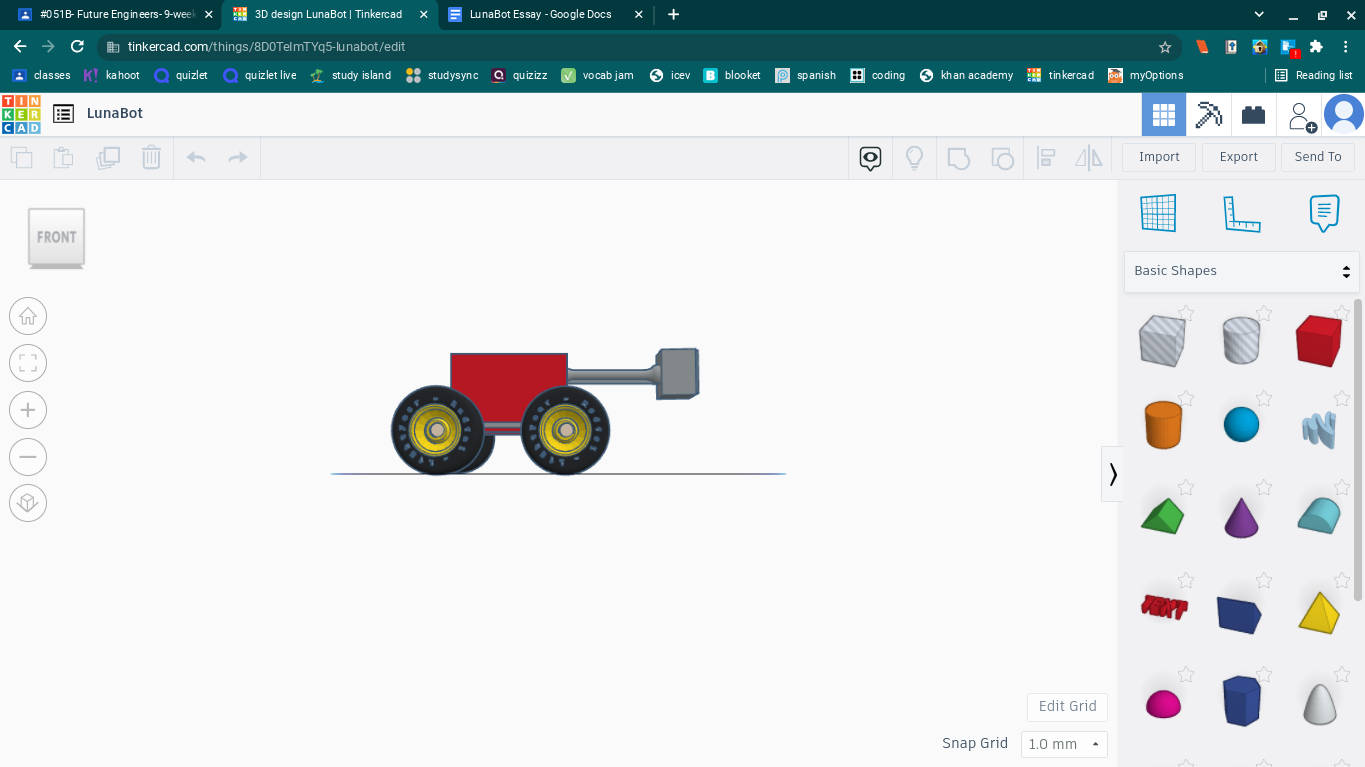
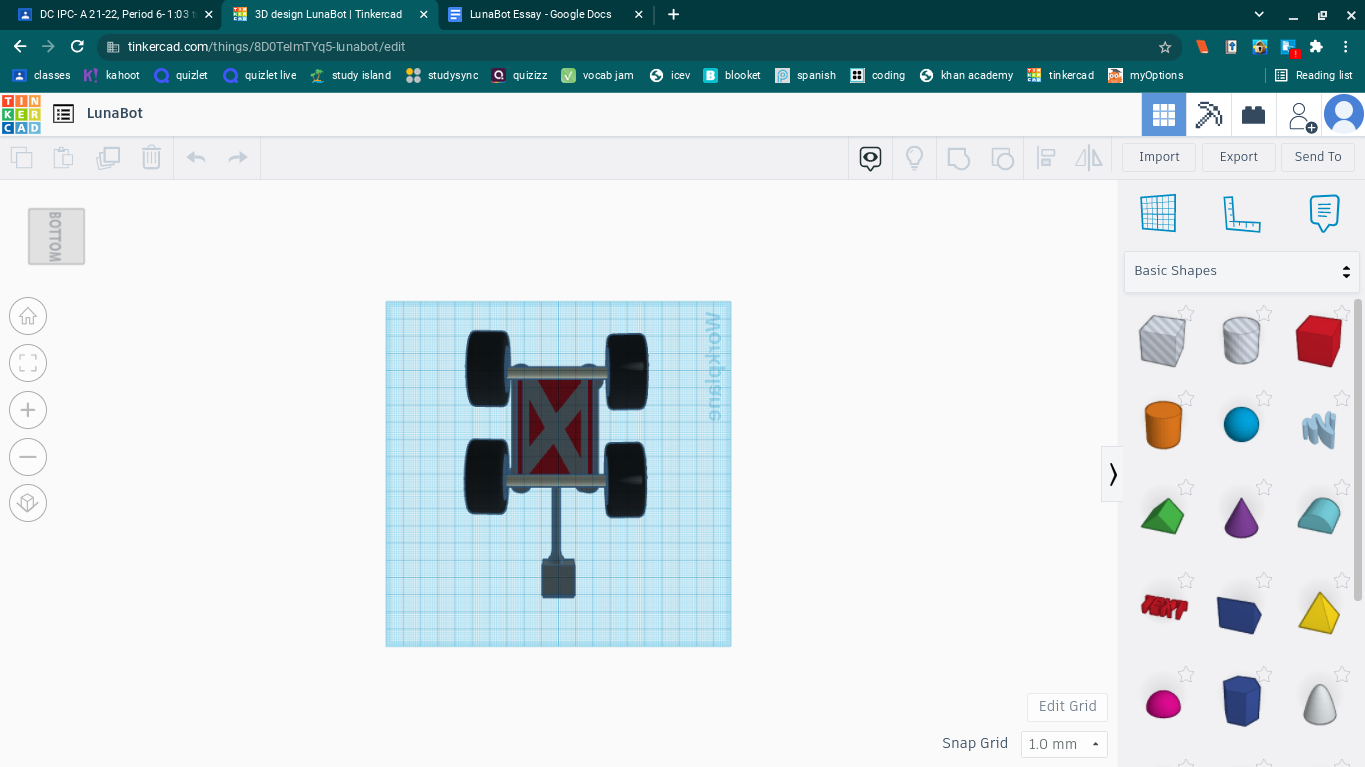
LunaBot is designed to be capable of moving lunar soil. LunaBot is able to move because it’s chassis sits on four wheels. The wheels are held together by two one-fourths sized aluminum axles. The structure, a rectangular bowl, is held up by diagonal aluminum platforms and two parallel aluminum frame c-channels towards the outside of the structure for extra support. The structure itself is composed of five aluminum rectangular structures. Four are molded together to make something resembling a box , however they are sitting on another rectangular plane to complete the bin shape. The “scoop ,” is used to pick up lunar soil. It is constructed from the same aluminum framing as the structure, just reduced in size. A ball joint - is connected to the main structure and holds the scoop. LunaBot has the capability to maneuver around the moon while collecting lunar soil.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org