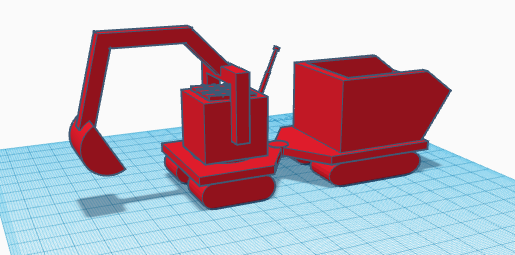
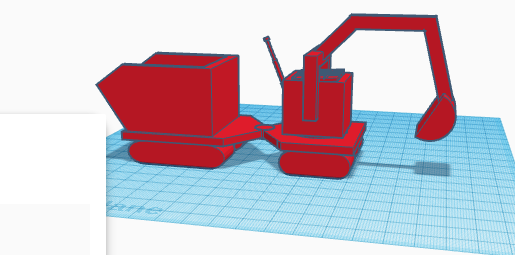
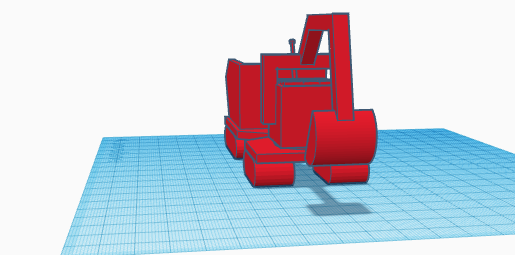
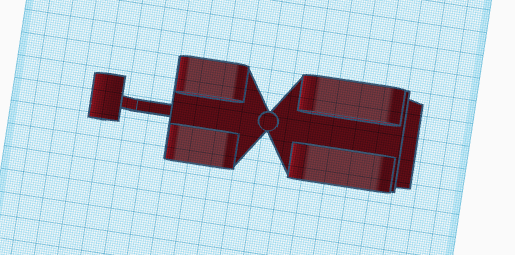
My lunar robot would be trademarked as “The Lunar Scooper”. It is designed to be a mini-excavator and dump truck all-in-one , to be more of a multi-tool robotic rover. It can scoop regolith up just like an excavator on Earth and then turn all the way around and dump it in the container to be carried off somewhere else. This rover is designed to to eventually be produced industrially, and if needed be controlled by an operator riding on the outside .
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org