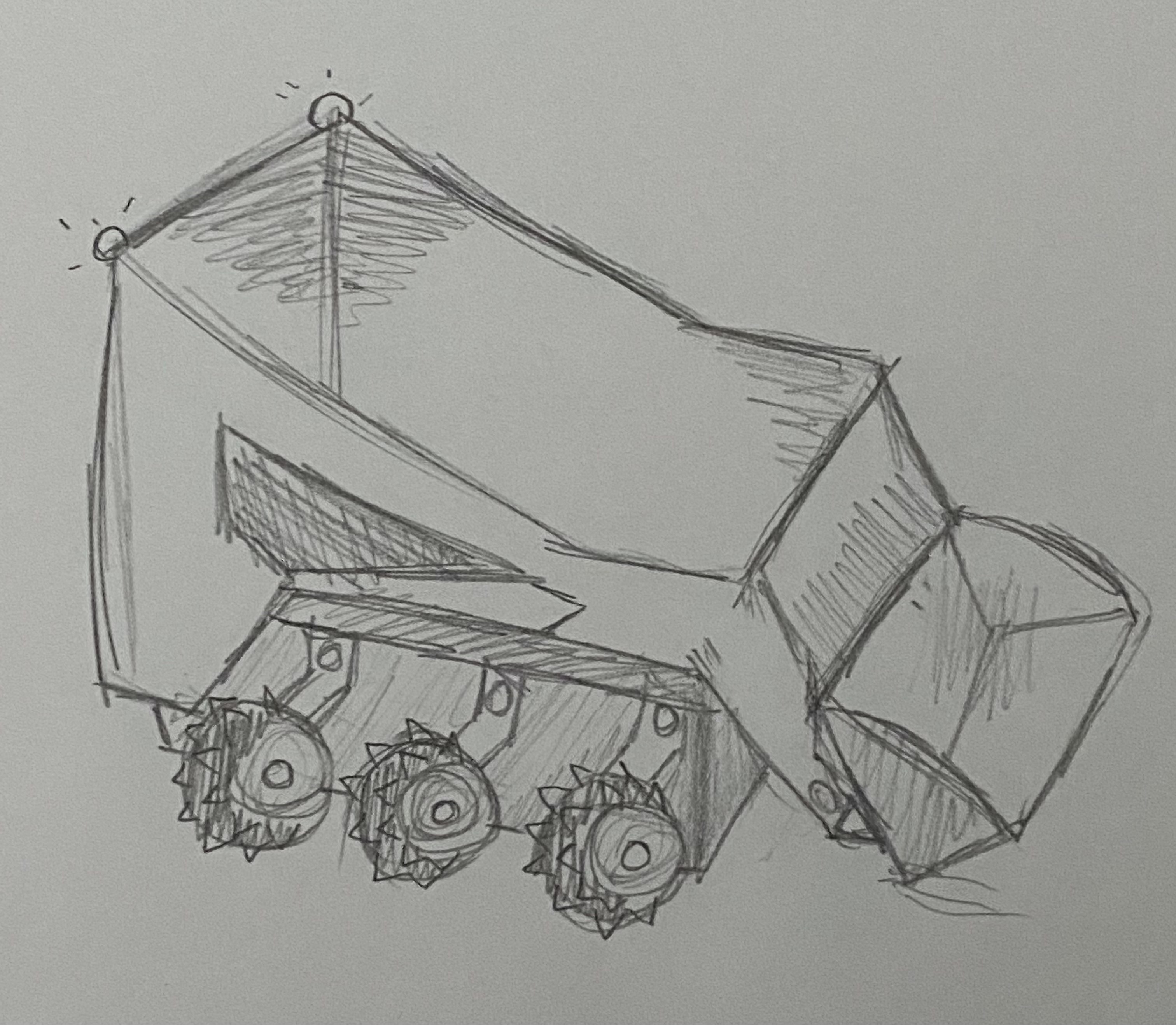
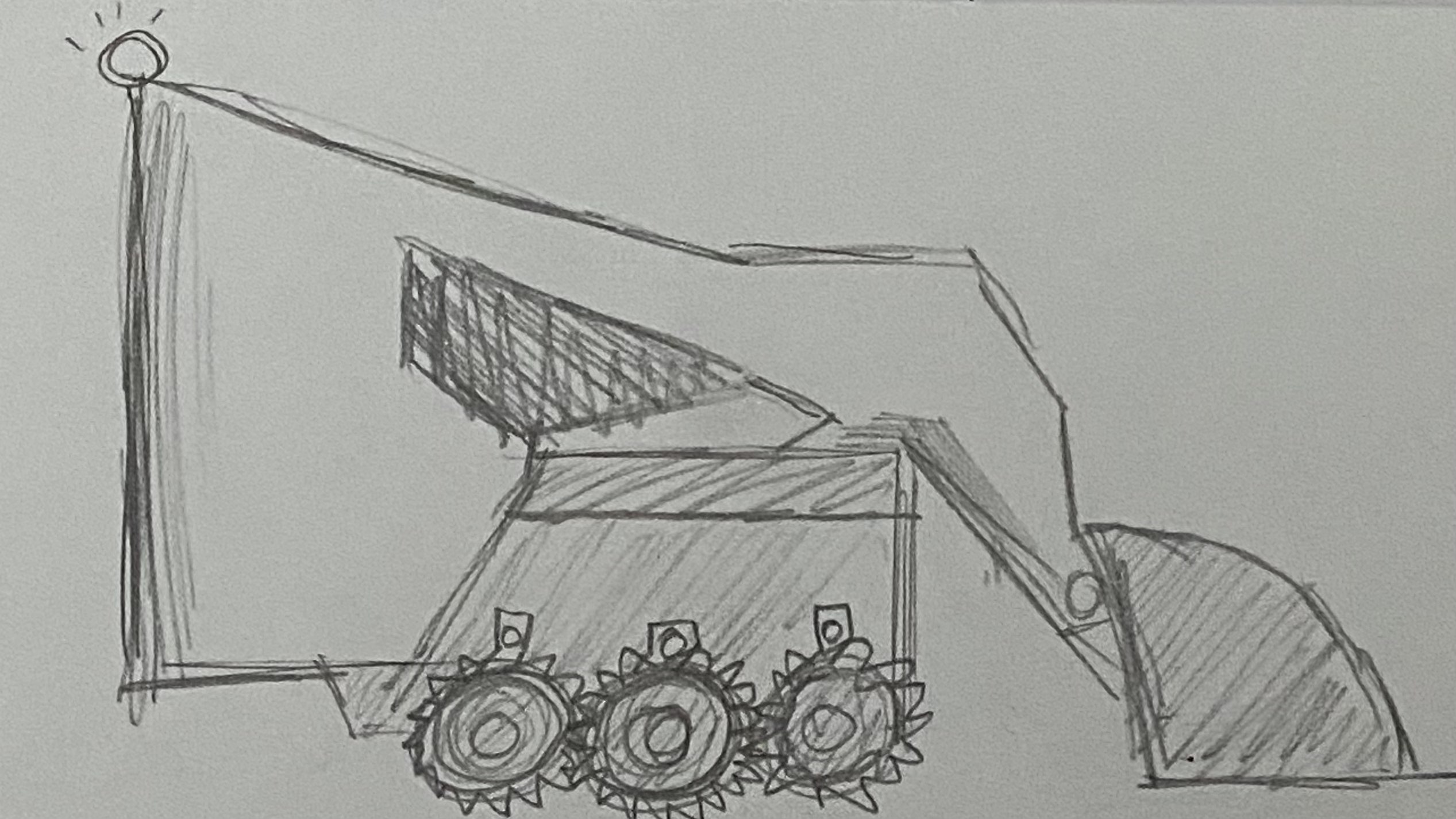
The operation of the robot will be autonomous using a mapping system. The power system being used is an RPS for long lasting power supply. Lower-middle center of mass. It will be slow and steady. The robot will maintain traction on the Moon's surface by having small but spiky wheels. The robot will handle the extreme temperatures on the moon by carbon-carbon as well as piezoelectric materials. The robot will use LETO. Lastly, the robot will excavate the Lunar soil by using a scoop-loader.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org