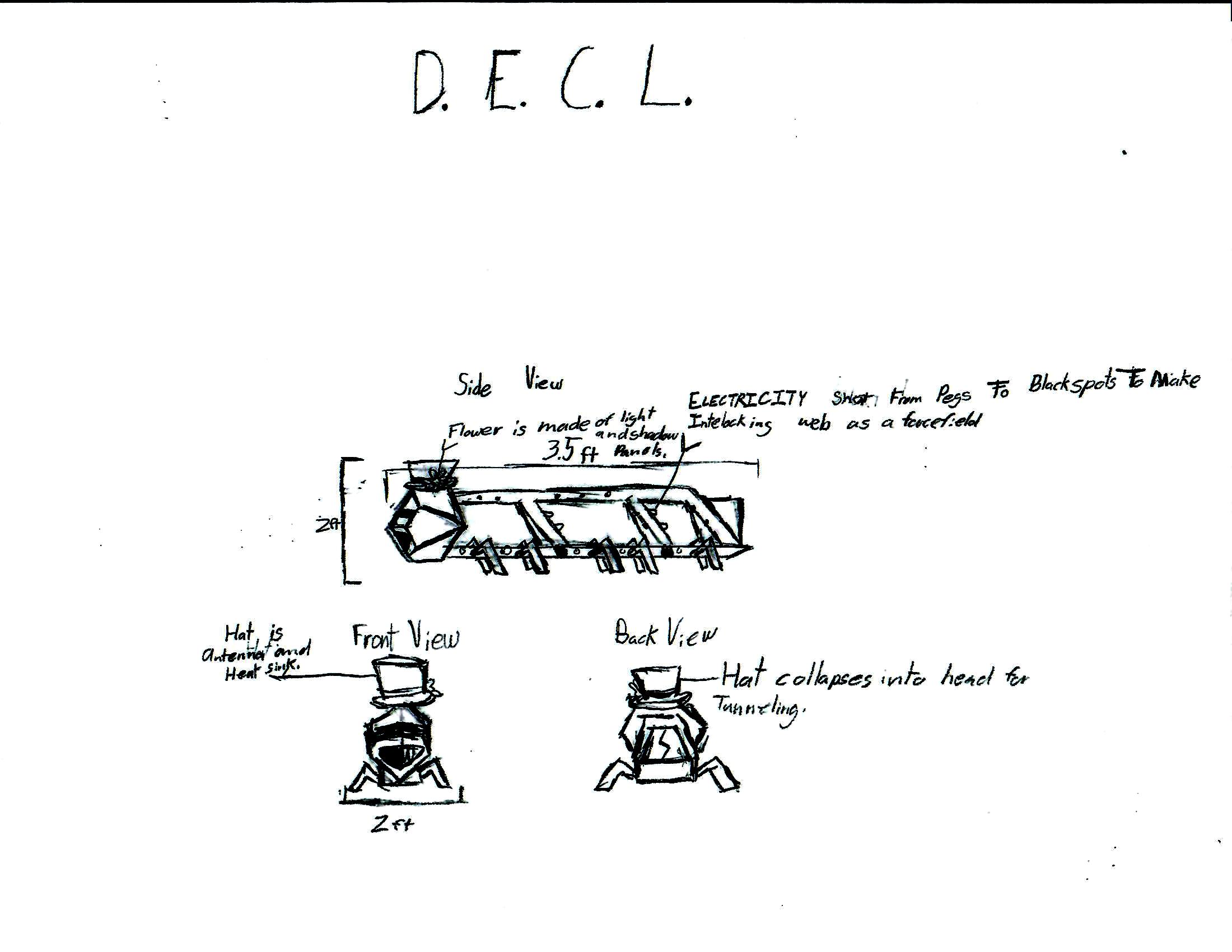
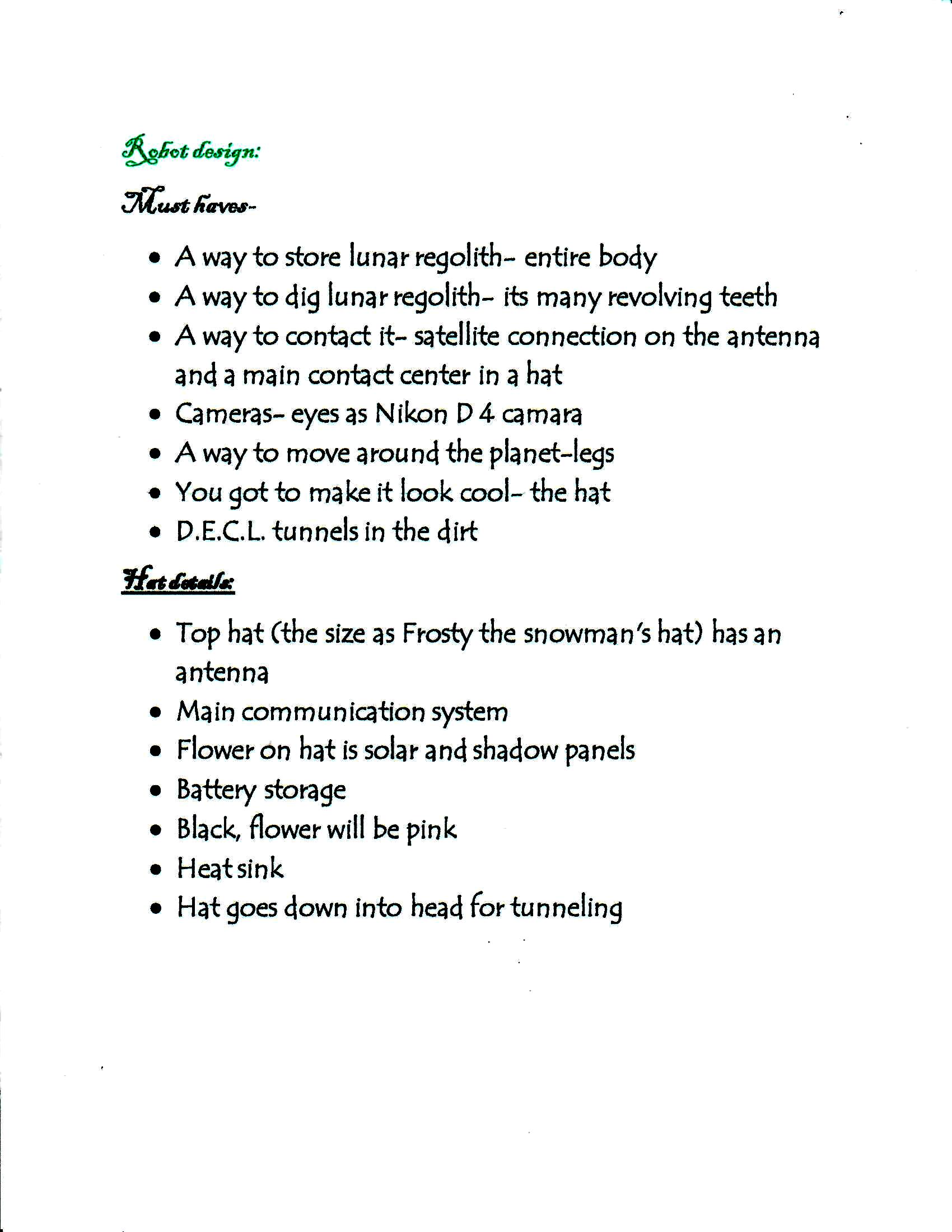
D.E.C.L. (Digging Electronic Containment Lunar Bot) How will this robot dig and move lunar Regolith? The robot has a design like a centipede. It has a long body and 10 legs. But to take in the lunar Regolith, It has a retractable jaw. This is so the lunar Regolith will be collected into the "mouth' of the robot. To dig, I have given the robot multiple rows of revolving teeth in the mouth to shred and plow through the Regolith. Operationally, the robot is designed to have an expanding force for most of it's body. This means the body expands, so the more dirt collected, the more storage there becomes. To deal with dust, the robot will have a docking port, dirt removal on the bottom and a force-field will keep the dust away.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org