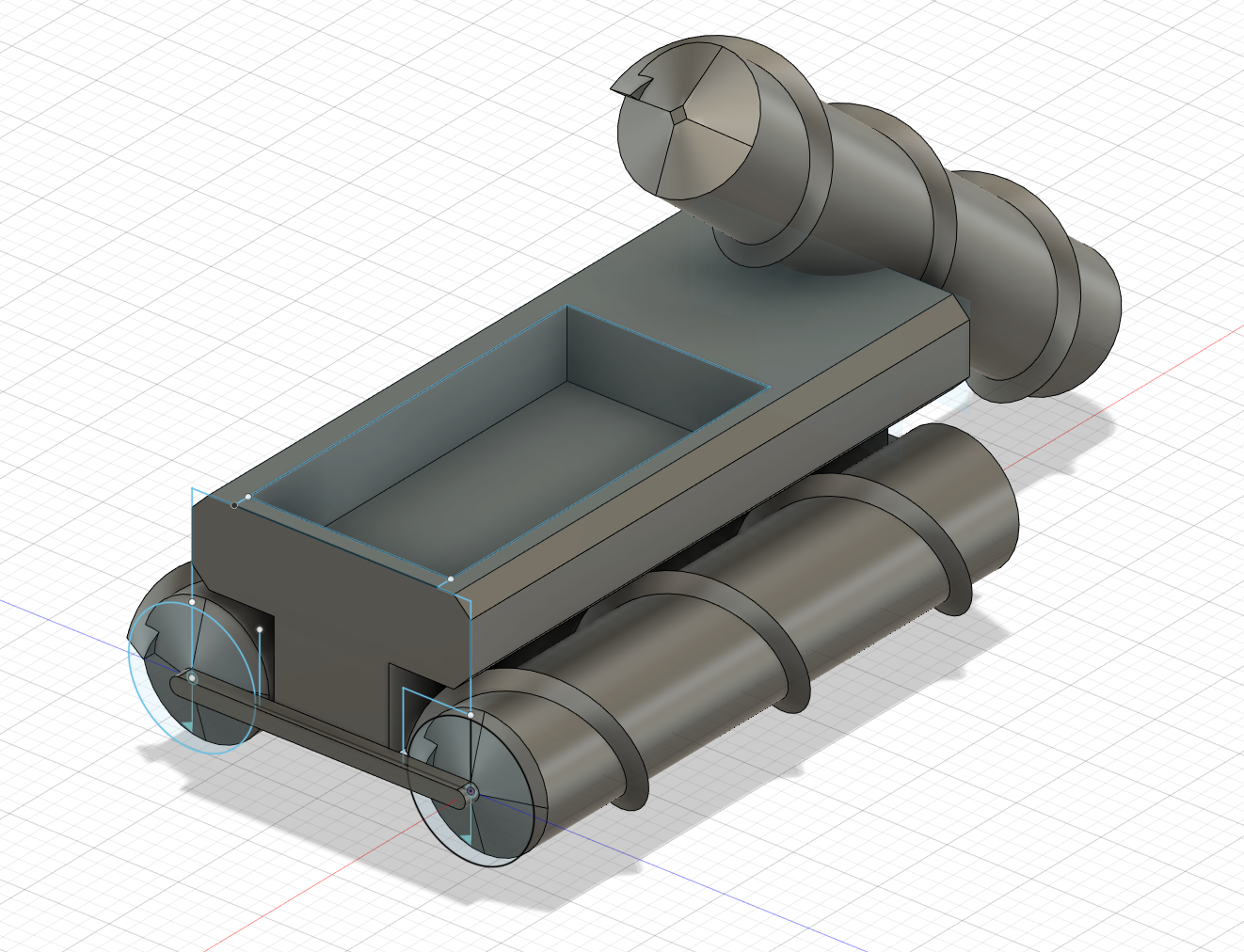
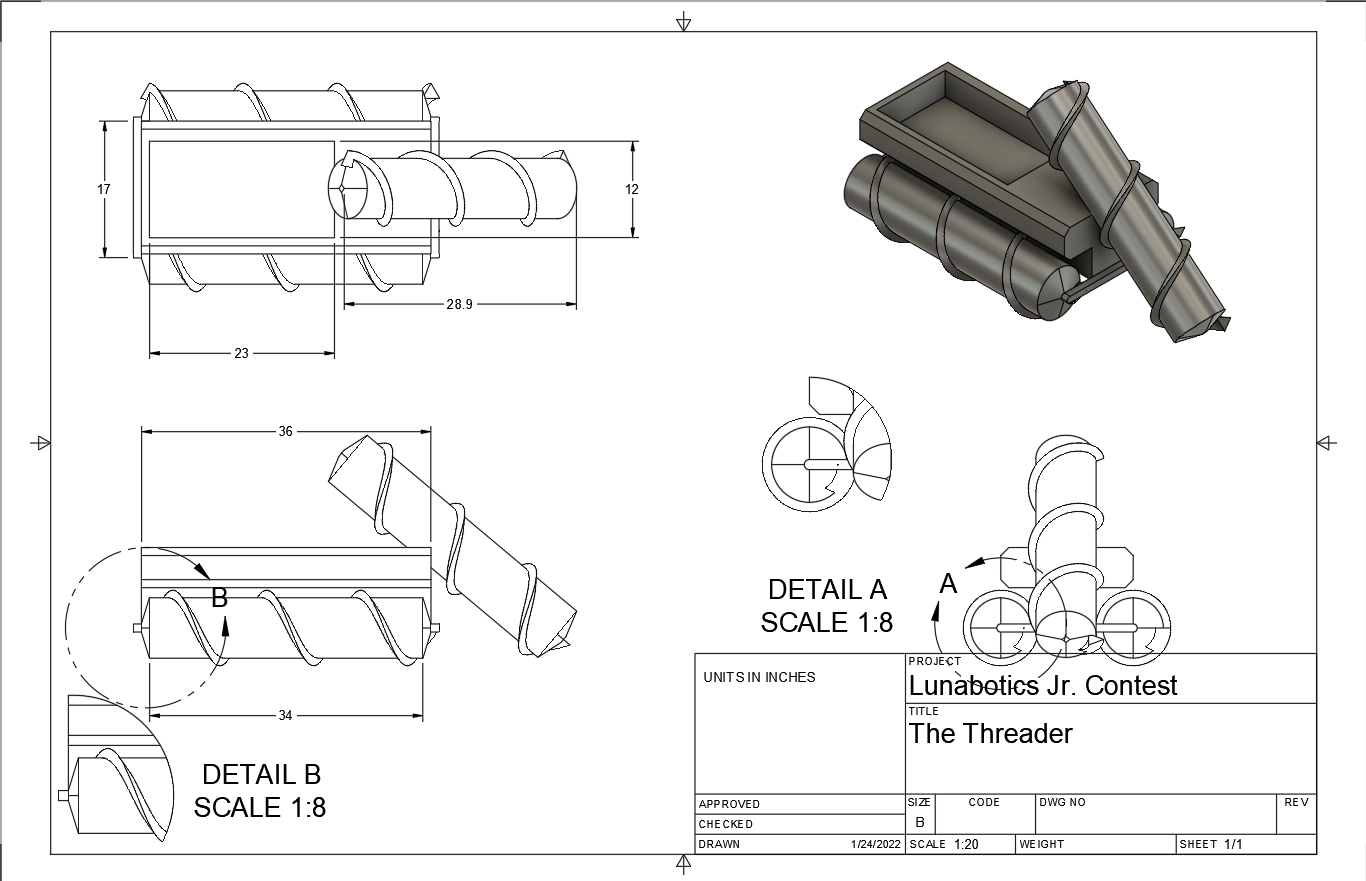
The Threader will move through lunar regolith using two screws that rotate through the dirt. An Archimedes screw like the propulsion screws will be used to push lunar regolith up to a deposit location towards the top of the robot. The Threader will move a large amount of regolith because the frontal screw that scoops lunar dirt can constantly run while the robot pushes through the moon's surface. In addition, the deposit on the top of the screw is sizable and can be removed for ease of deposit and storage. Lunar regolith's sticking properties can ground a robot, but the screws that power the Threader are covered with a stainless-steel mesh that repels regolith and prevents the robot from getting stuck.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org