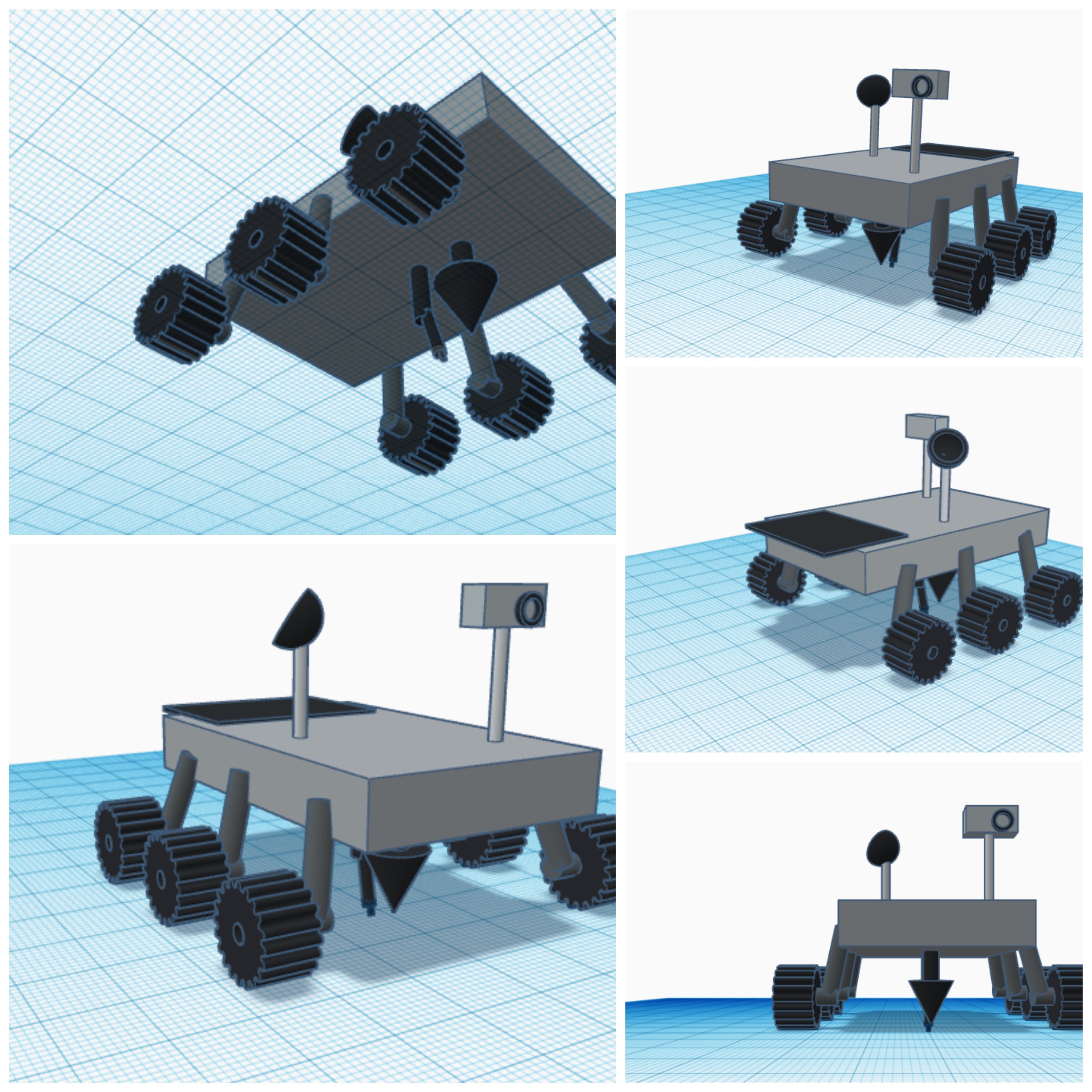
The robot will use a carbon composite to withstand extreme heat. For digging, Spatium will use a slow electric drill with a scooper to gather lunar soil. Spatium will have wheels with a design similar to perseverance. The center of mass should be in the center of the robot, so once the soil is carried, it will avoid an imbalance of mass. The speed is varying since it may need more speed to go around the moon sometimes. Spatium will use a special coating by NASA to minimize dust on the outside, as a backup method, it will use a brush to brush off any dust sticking to critical components. For power, it will use solar power, but during the night and as emergency power, radioisotope power. It will be autonomous using pictures for movement, sensors for the ice location, and radio signals to find the Artemis base.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org