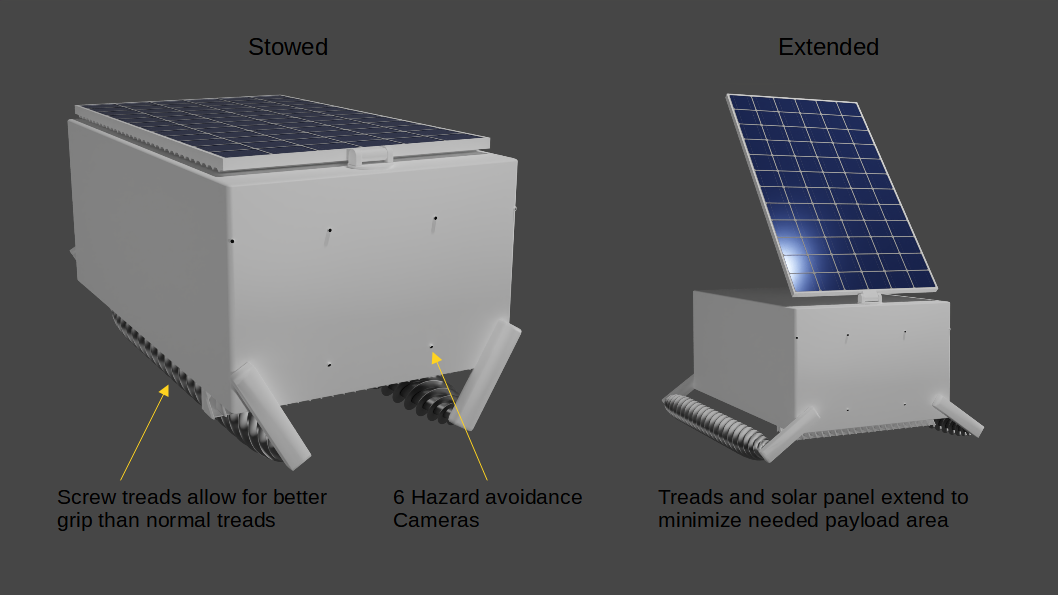
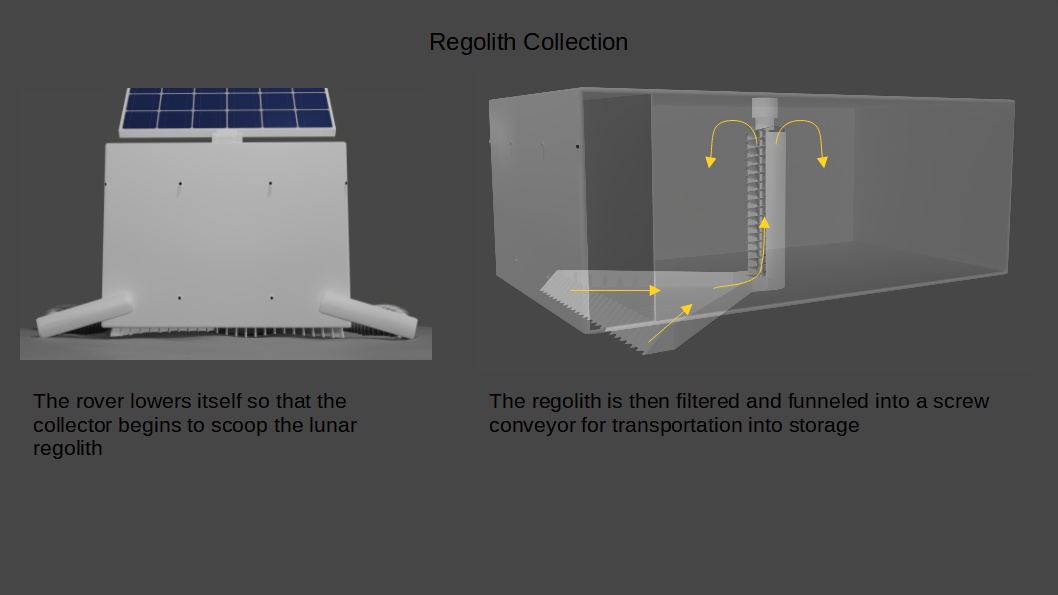
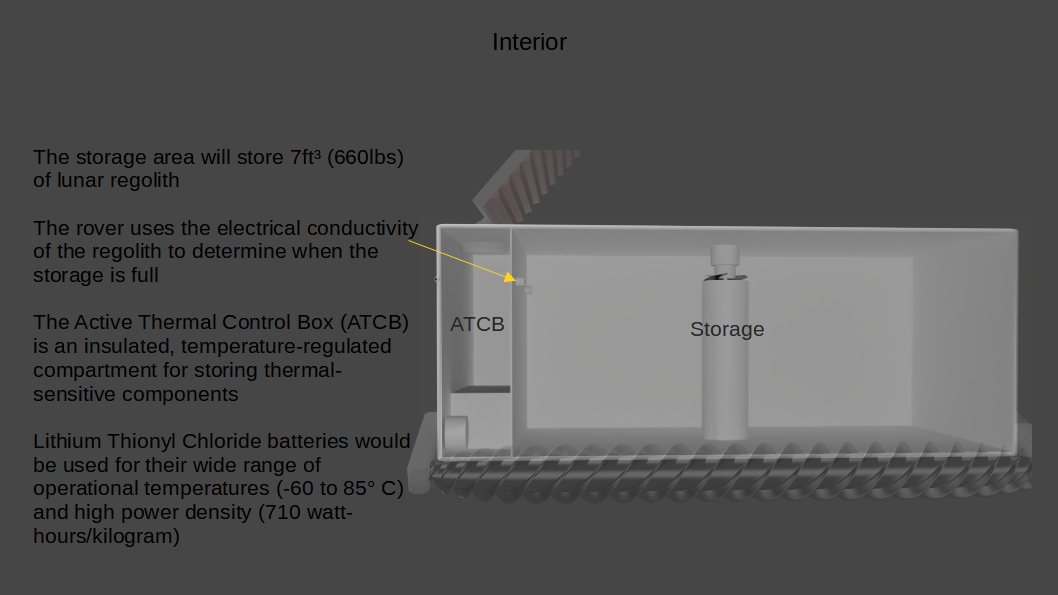
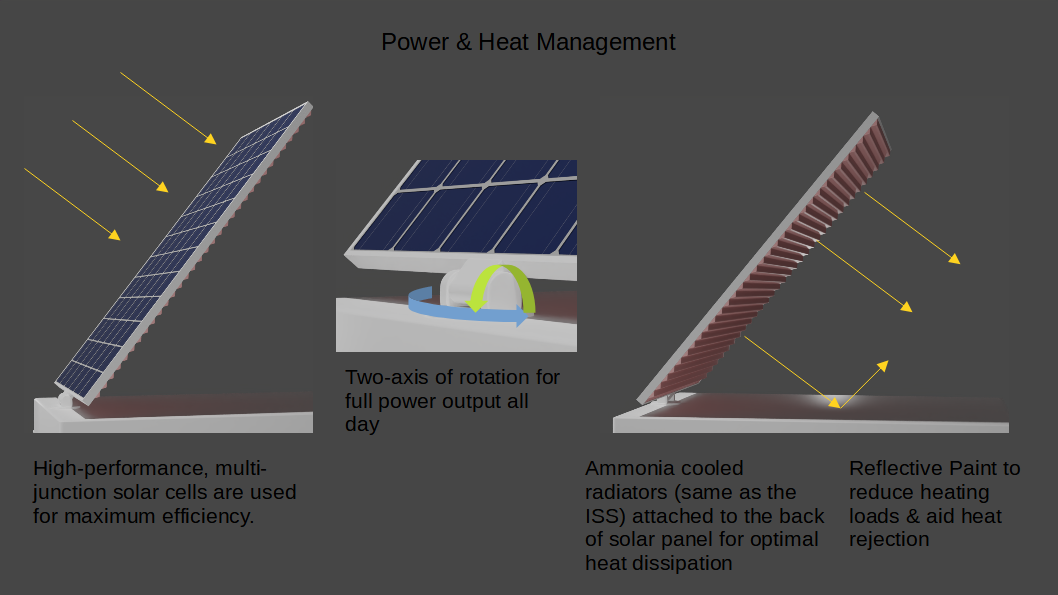
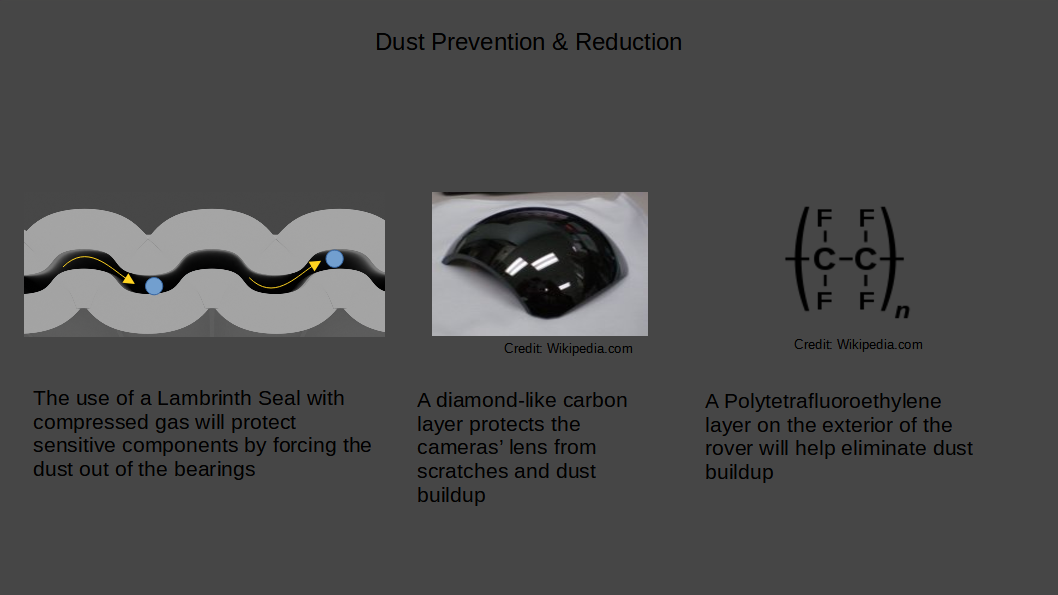
My autonomous rover will use screw treads for more traction in low gravity and have six navigational cameras. It scoops up the regolith and a screw conveyor transfers it into storage. The rover uses the electrical conductivity of the regolith to know when the 7ft³ storage is full. It would include an insulated, temperature-regulated compartment for storing thermal-sensitive components. The rover would be powered using a two-axis high-performance multi-junction solar panel. For power storage, Lithium Thionyl Chloride batteries would be used for their wide range of operational temperatures (-60 to 85° C) and high power density (710 watt-hours/kilogram). Excess heat would be ejected using an ammonia radiator on the opposite side of the solar panel. A labyrinth seal with compressed gas would keep bearings dust-free. A diamond-like carbon layer would protect the cameras’ lens from scratches and a polytetrafluoroethylene layer on the rover exterior will help eliminate dust buildup.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org