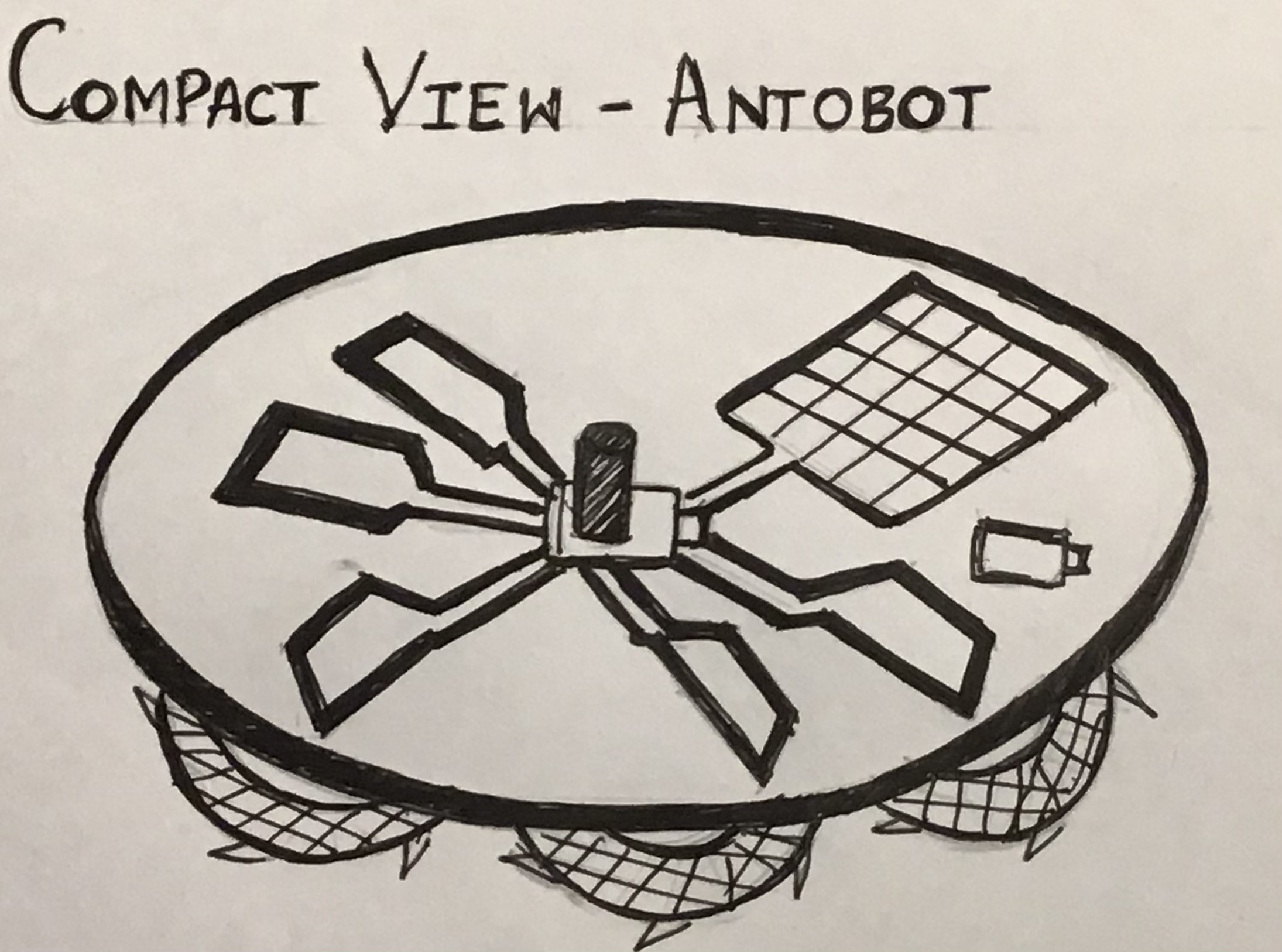
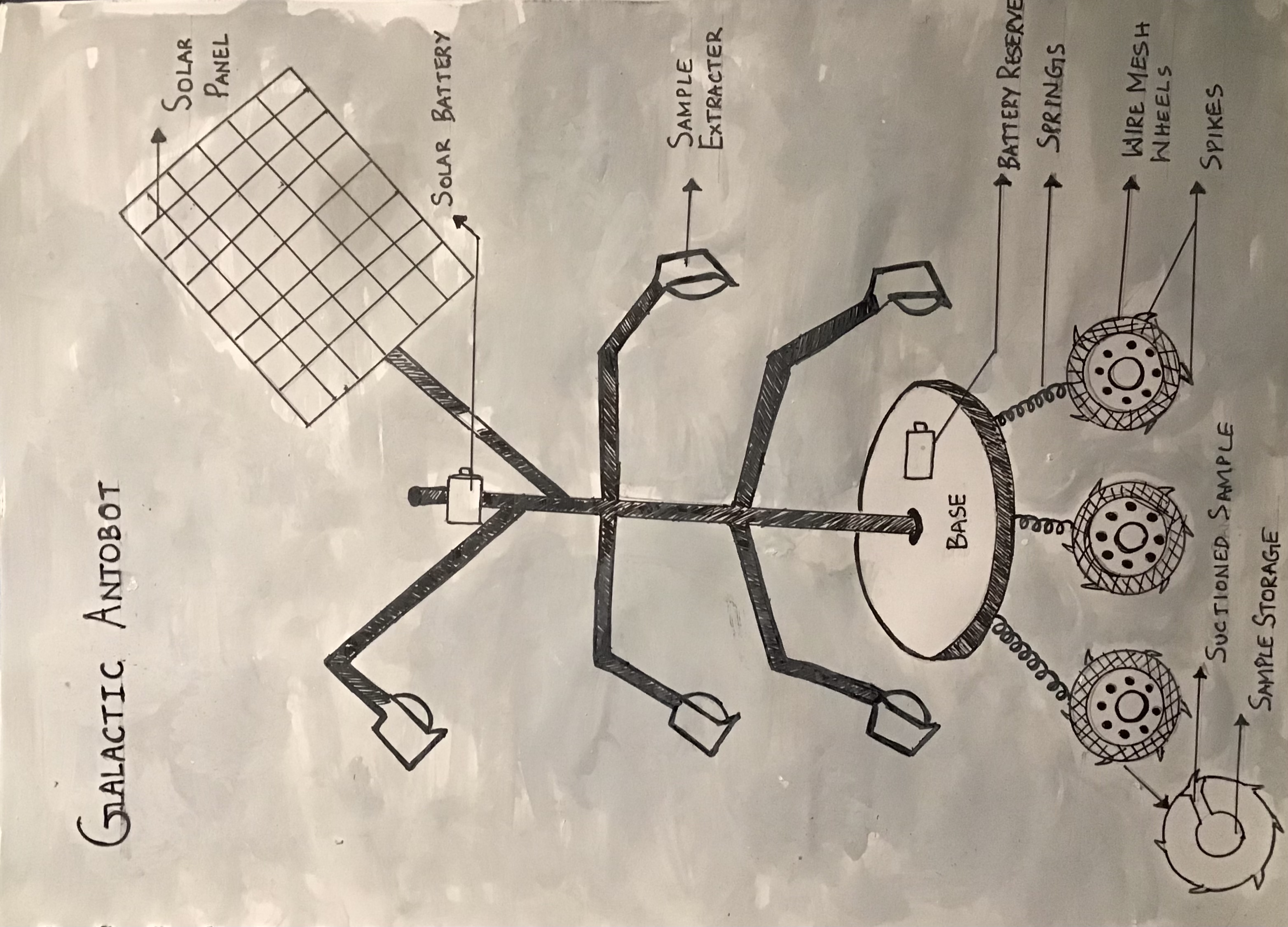
My inspiration for depicting this robot occurs from a combination of - ant, toy monster truck, and cricket shoes. The multi branched trunk (analogous to an ant) serves as sample extractors (equivalent to truck digger) topped with lids to secure the regolith samples. The wheels of meshed wires attached via springs enable the robot with bouncing capabilities on rocky surfaces. Spikes (similar to the ones on the shoes) with suction functionality will retrieve furthermore samples and deposit in the storage located at the wheel’s center. Additionally, the robot gains stability as spikes can prevent floating, due to the lack of gravity on the Moon. A solar panel acts as the source of energy along with an add-on battery reserve at the base. Antobot layered with a material composition akin to lunar dust repels the dust. Finally, the compact robot design allows its branches and tires to retract.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org