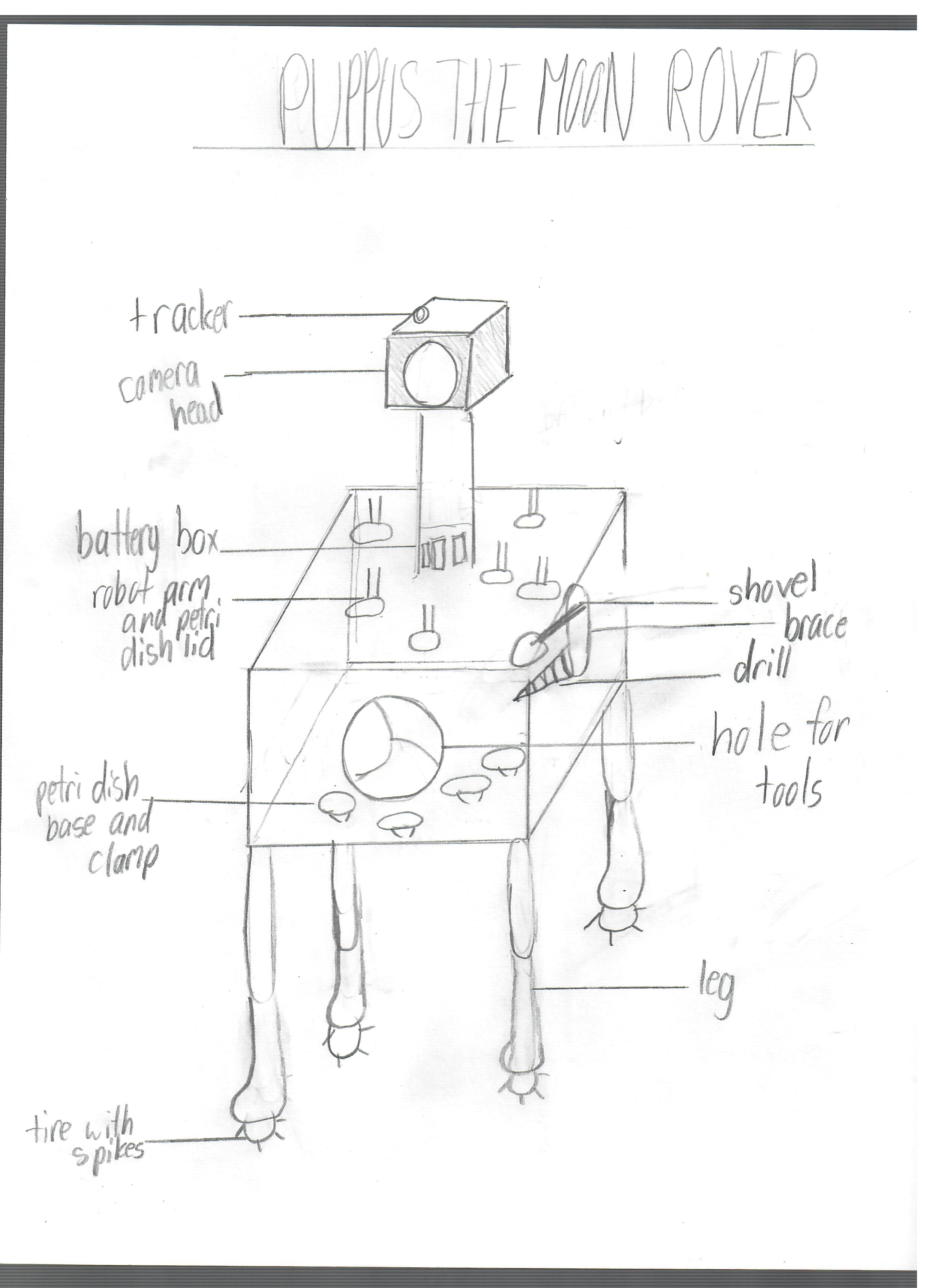
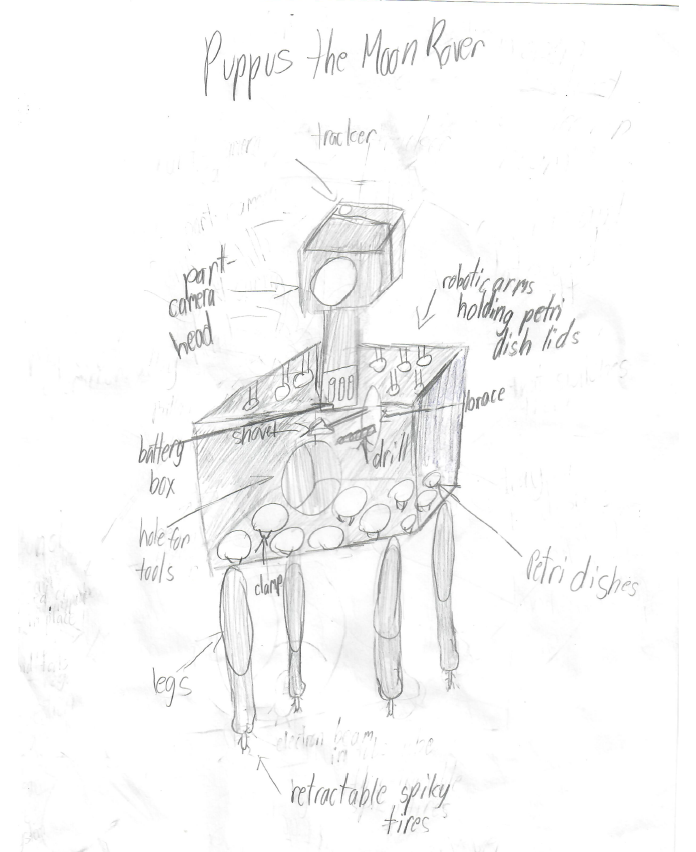
My robot is remote-controlled and goes to it's charging station once it's charge is 60%, thanks to a tracker on it's camera head's info. It has jointed legs for jumping and tires that activate when on regolith with internal mechanisms to help it survive lunar temperatures and spikes to help it stay on the ground. It's body is made of aluminum alloy to help it survive extreme temperatures and because it's the perfect weight. A shovel and drill that extend are held by a brace, which go in and out the rover through a hole that opens and closes. Once the shovel is inside, it turns over, hits a petri dish to get the regolith in it, and pulls away, letting a robotic arm screw on it's labeled lid. At it's charging station, the petri dish clamps loosen and the rover's walls open up. It's measurements are 3 *2.5*2.5 feet.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org