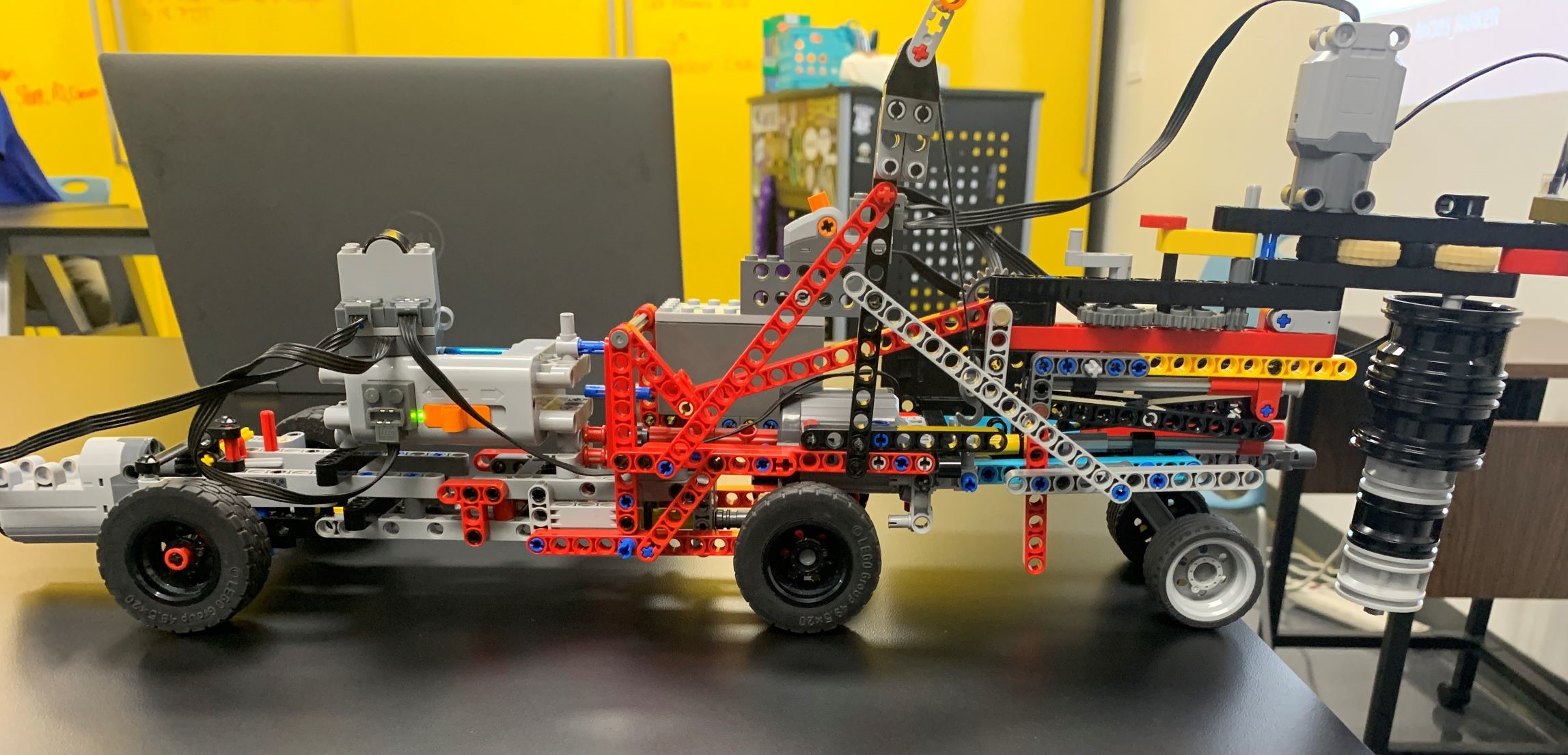
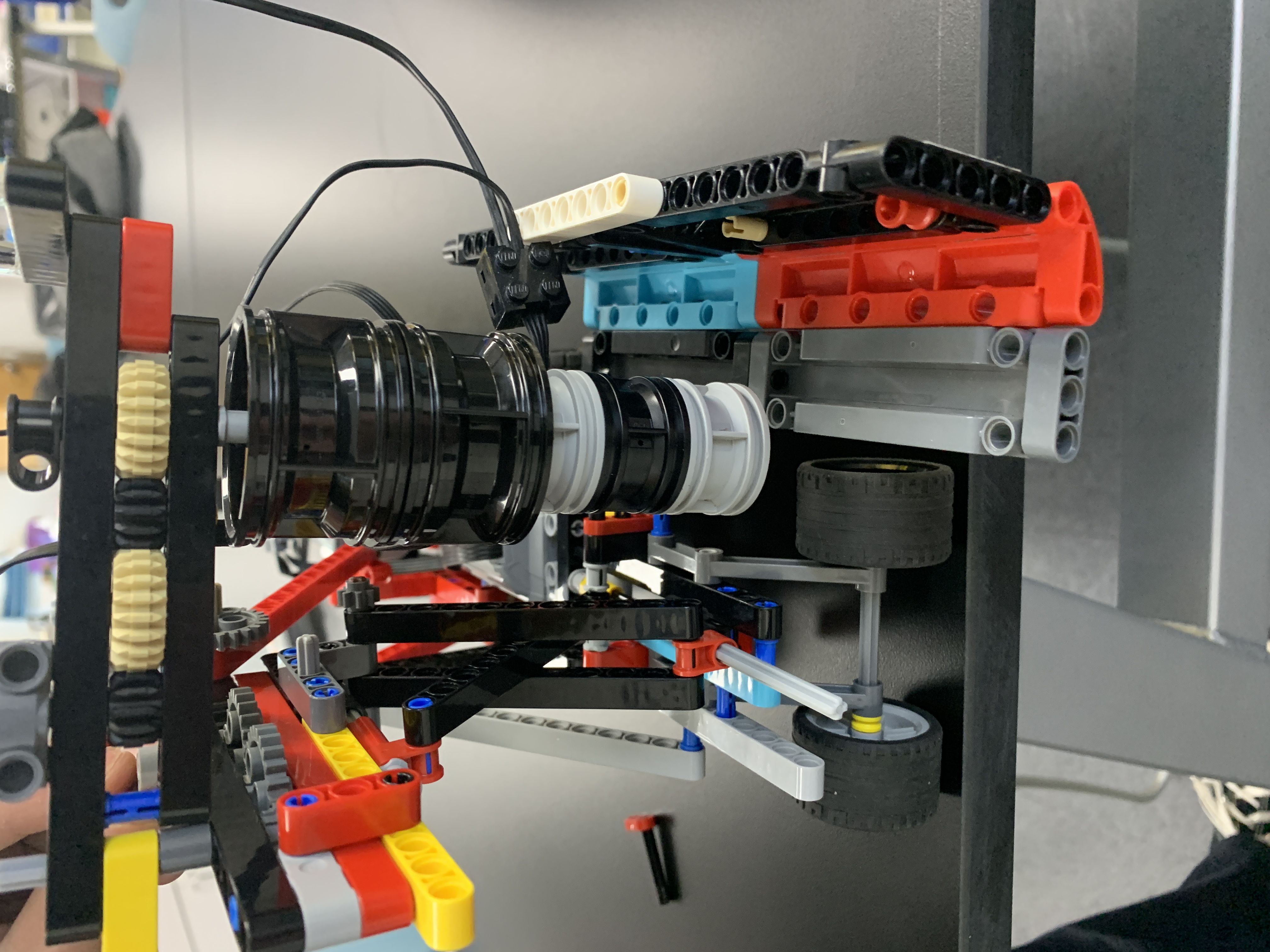




The Rover will have a 500 watt drive motor with a 50v, 10amp battery. It would have a gearbox with drive, reverse, and park options. It will also have all wheel drive. Solar power will charge it at base, and an alternator will charge it as it drives. The mechanism will be a drill with retractable flutes attached to the back of the rover. A separate battery will be mounted to power the drill. (30,000w, 3,000v 10 amp batt) Rubber tires with STRONG plastic wheels will be on the rover, ensuring no static dust will clog anything. The rover itself will be made entirely of sturdy electrostatic discharge plastic. Each item sitting on the chassis of the rover will have a certain weight, therefore solving the COG. While drilling, small spikes will be deployed off the sides of the rover, therefore solving the COG’s mechanical force.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org