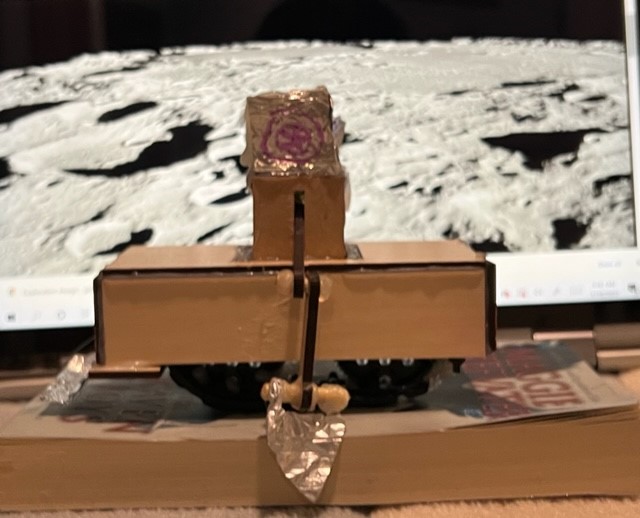
To provide the most flexibility in scooping and digging, my rover is designed with a shovel that can move horizontally and vertically. Because solar panels and batteries are heavy, it is designed to have continuous power from the Artemis base using a power cable that can reel in and out.
The rover’s movement system is through a continuous tread. This design will allow it to move around and make wide turns with few problems, taking small loads through many trips. The tread is important because it lessens the electrical components. Instead of four motors, it will need only two motors. And with four cameras, it can see all around. To ensure that the mechanics
stay dust-free, there is a bender behind the back wheel and a flap to protect the mechanics of the cable and shovel. This helps the dust stay away from the rover’s mechanics and causes fewer problems.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org