

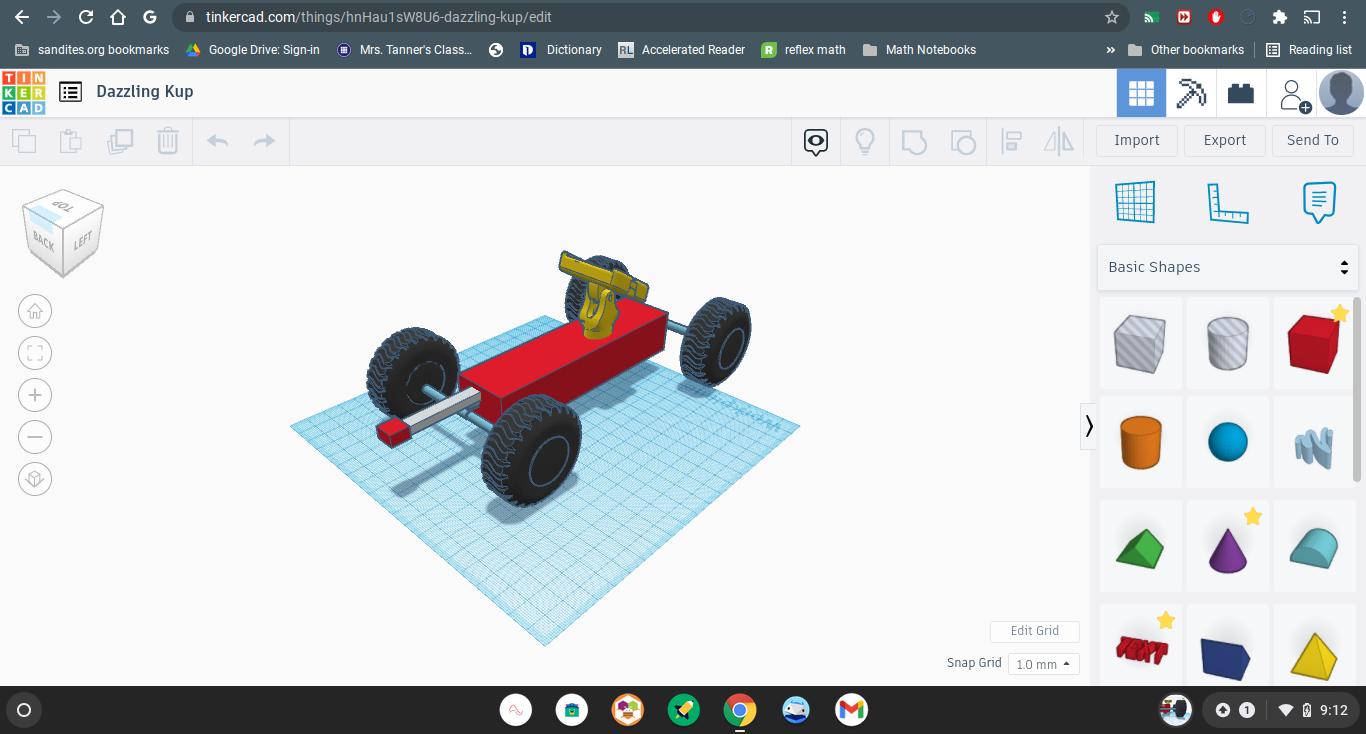

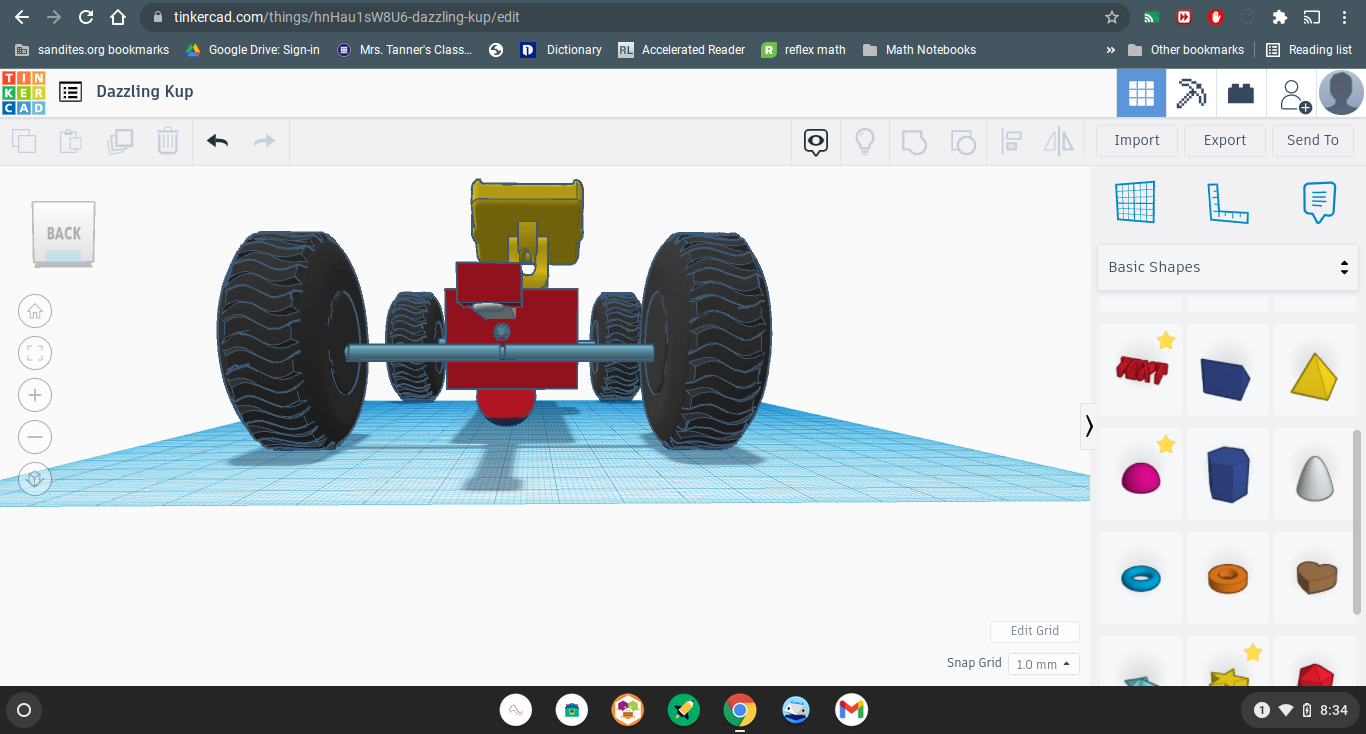

C.A.R or Computer-Automated Rover
I chose this design because it has no holes to allow dust and it also has a camera to scope the area. Also, it has a retractable scoop on the Bottom so that it can easily get soil. The first effector moves the wheels, the second effector moves the camera side to side or in and out. The third effector moves the scoop up and down. My robot is different because mine has a camera that can move so it can search the surface while picking up the soil. It also has a scoop instead of a claw so that it can hold the soil better and pick it up easier
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org